ちゃぶ台ファクトリー
 |
 |
 |
 |
 |
2足歩行ロボットのこと
大学の研究室では2足歩行ロボットの開発をしました。
今から考えると当時やった内容が学問的と言えるかどうか疑問ですが、小学生の時から
憧れていた歩行ロボットの製作が出来て本当に幸運でした。
私が所属した研究室はホンダのP-2やASIMOの遙か以前、1982年に高速動歩行を
実現した舟橋宏明教授(現在は退官)の研究室でした。
下記を参照して下さい。
世界の2足歩行ロボット研究 (産業技術総合研究所 梶田秀司博士のHP)
上記の高速動歩行を実現した2足歩行ロボット「MEG-2」は、実はロボットと言えるもの
ではありません。主モータの速度制御以外に一切の制御工学的手段を用いず、ZMPの逐次計算や「倒立振り子」としての高度な制御は行っていません。
リンク機構だけで3次元2足動歩行を実現する「歩行機械」と呼ぶべき物です。
この「MEG-2」の両脚、両足は機械的に連動した1自由度のリンク機構で出来ています。主モータはプリントモーターで、いわゆる「サーボモーター」ではありません。
エポックメイキングな機械でしたが、制御工学の研究対象としては自由度が少なく、応用
しにくいプラットフォームです。
私の研究テーマは歩行ロボットの「制御」と決まっていたので、メカ技術のみで、自由度の
無いMEGシリーズでは、ちょっと困ってしまいました。
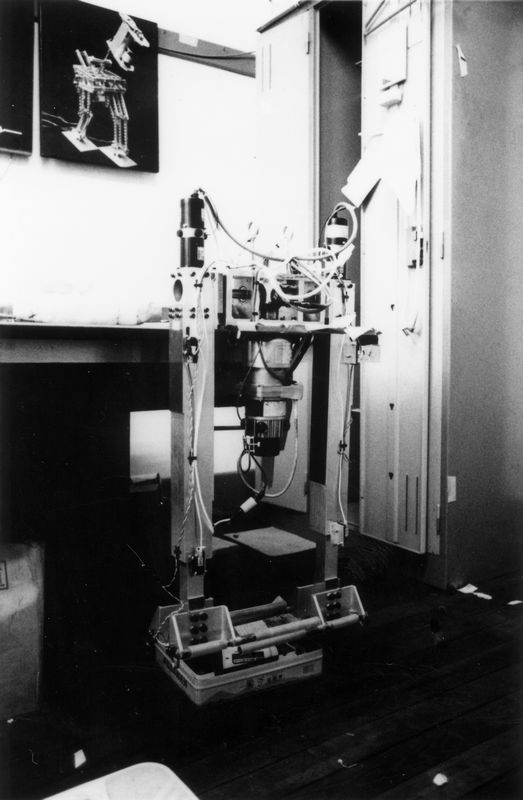
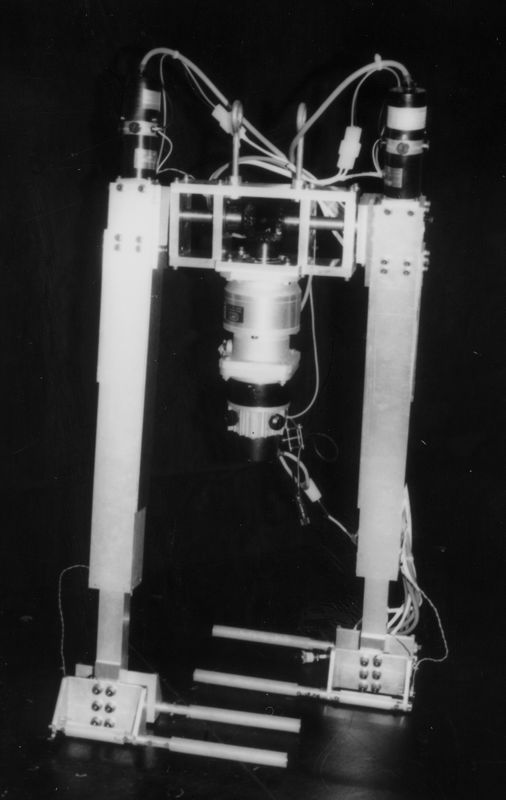
そこで作ったのが下の写真の歩行ロボット「波平1号」です。
 |
 |
|
| 波平1号 休憩中 | 波平1号 歩行中 | |
| 保管用のつり下げ台に引っかけた様子。 後ろに見える写真はMEG-2の勇姿。 |
2次元歩行だけど一応動歩行しました。 当時としては快挙(?)。 |
私の研究は「制御」とは言っても「反射制御」。高級な現代制御ではありません。
「反射制御」というのは、熱いヤカンに触ったときに無意識に手を引っ込める様な生物の
「反射」と同義です。
「反射制御」は、当時、車の衝突回避などを目的として、一部で提案されていました。
センサが一定のパターンを検出すると、ブレーキを踏んだり、アームを引っ込めたり、足を
踏み出したりするわけです。
私の歩行ロボット「波平1号」もある姿勢をとっているときに、足裏のセンサの接触パターンが
変化したら、用意された足の動きを「反射」的に実行し、次の姿勢をとるというものでした。
用意した「反射」を連鎖させて歩行を実現します。
(医療系の用語にも「反射の連鎖=Reflex Chain」というのがあります。赤ちゃんの歩き
始めの歩行や酔っぱらいの「オットット」歩行はこれに近い物です。
「波平」の名はサザエさんのお父さん「波平」から。「波平」はお酒好きですよね。)
主コントローラはNECの98シリーズのパソコンで、モーター3つの3自由度でした。
プログラムはマクロアセンブラで記述しました。
当時花形研究室だった早稲田大学加藤研究室のWABOTなどはスパコン制御でした
が、このロボット制御したCPUは80286相当です。
部品の加工は全て研究室裏の工場、学内工場で行いました。
ちなみに足はアルミ押し出し材の角パイプです。
情けない仕様の上、ASIMOの様な素晴らしい3次元動歩行ではありませんが、歩いたときは本当にうれしかったです。
夜中の2時に大岡山の広い学内を駆け回りました。
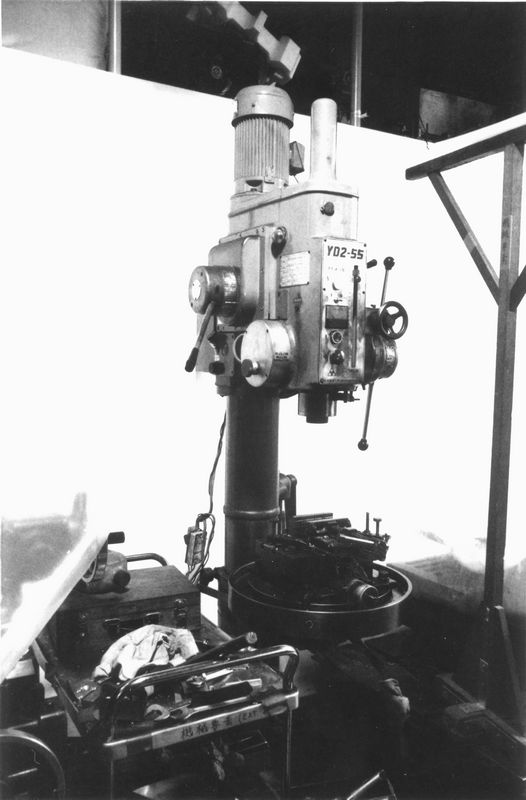
研究室併設の工場の工作機械たち
 |
 |
 |
||
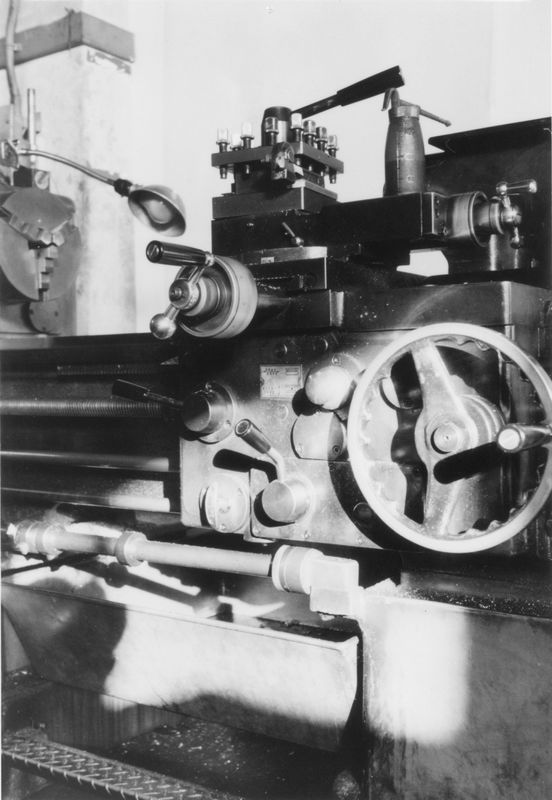
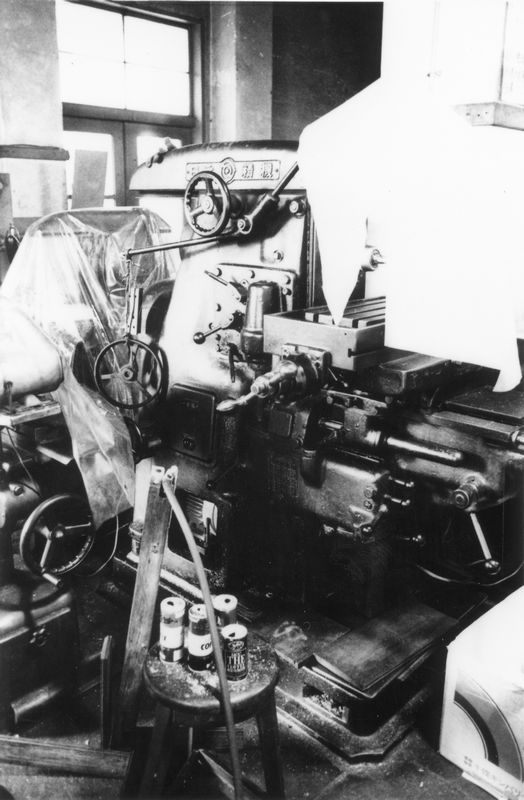
| 研究室の中型旋盤 | 研究室の横フライス盤 | 研究室の大型ボール盤 | ||
| 戦後すぐぐらいの物。 私はこればっかり使ってい ました。 |
大正時代のもの。 モータの入れ替え工事を しました。ガタガタです。 |
こちらも良く使いました。 結構大きくて立派。 |
色々あって、ノイローゼ気味になったり、楽しい思い出ばかりとは言い難かったし、肝心の
修士論文の内容も学問的とは言えぬ中途半端なものでしたが、懐かしい思い出です。
工場で独習した機械加工や研究室でとっていた雑誌で独習した電子回路の知識は
今でも大事な私の技術的バックボーンです。
前のページへ
 このページの先頭へ
このページの先頭へ 