
| 新規作成 2013.4/24 |
| 最終更新 2023.3/30 |

リストに新しい機関車を追加します。
選択された機関車を削除します。
元に戻すダイアログが使用可能。
印刷のためのすべての機関車のリストを表示するデフォルトのHTMLブ
ラウザを開きます。 レポート を参照:
選択された機関車のコピーを作成します。 オリジナルのID名に"(copy)"が追加されたID名になります。
別のレイアウトファイルからすべての機関車をインポートします。
処理を高速化するためにインポートする前にLocoWidgetsを無効にします。
ゲストとしてLocoをインポートします。シャットダウン時に削除されます
前のセッションで保存したすべてのファンクション状態を復帰します。
最初のグローバルパワーオンの後に動作します。
前のセッションで保存した速度を復帰します。
最初のグローバルパワーオンの後に動作します。
![]() Rocrailの自動制御ではなくレイアウトが列車の流れを制御している場合にのみ、このオプションを使用します!???
Rocrailの自動制御ではなくレイアウトが列車の流れを制御している場合にのみ、このオプションを使用します!???
ロコタブに表示;リストをできるだけ短くするため未使用ロコを隠すよう設定できます。
ロコを隠している場合、テーブルの背景色が黄色に変わります:

LocDialog全般タブ。

IDは、この機関車を識別するための一意のキーとしてRocrailプログラム全体を通して使用される
ので、非常に重要です。
ショートIDは、スロットルディスプレイに、このロコを示すために使用されます。 これは、フリーテキストのオプションです。
コマンドステーションにショートID を書くためには、機関車のタブのコンテキストメニューで"Set Short ID" を選択します。接続しているスロットルにそれまでに設定したすべてのショートIDを転送するには、メニュー項目の"Control→Transmit Short IDs"を有効にします。
(OpenDCCとRocoのみ)
Railroad Road Nameともいう。路線名かと思ったが、次の"Road number"と合わない。
与えられた道路の名前のために機関車の道路番号。何だろうか。重要な項目で
はなく単なる情報のようなのでいいか。
表示のためにだけ使用される車両の説明を記述するオプションのフリーテキスト。主にメーカーや形式情報のために使用。
ダイアログ上の画像をクリックして、ファイルダイアログを開きロコのイメージファイル名を選択します。
小さい画像のセットがデフォルトでRocrailに組み込まれていますが、独自のイメージを作成して使用することもできます。
画像は230ピクセル幅×最大80ピクセルで、サポートされている形式のいずれかである必要があります。
サポートされる形式:
Rocrailフォーラムhttp://forum.rocrail.net/album_cat.php?cat_id=1に
ユーザーが投稿した画像のライブラリーがあります。カスタムlocのイメージを作成したら、他のRocrailユーザーと共有するためにそれ
らをアップロードしてください。
訳者コメント:ここに最適な日本型車両の画像として「遠い汽
笛」様が提供されている素晴らしいイラストがあります。公の場で間接公開もせず、全くの個人使用であれば使用可能とのことで、こんな感じでサイズを縮小するだけでそのまま使えます。
Massothのような、いくつかのコントロールステーションは、携帯端末上に正しい画像を表示するために画像番号が必要です。
このフィールドをゼロのままにすると、ブロック適合チェックは行われません。列車にとって短過ぎるブロックを走行しないようにするには、本 当の長さ( 長さ=すべての客貨車の長さ+機関車の長さ )の値をここに設定し、また、すべてのブロック長 を設定するのが賢明です。
長さの単位は、例えばcmやinch、ユーザー定義ですが、Rocrail全体のすべての長さすなわちブロック長と自動モード設定 の定義は、同じでなければなりません。
2番目のフィールドは、この編成の車両の数です。ルート上の車両を数え
るために使用されます。
あなたの記録のためだけで、どこにも表示されません。
この機関車のユーザーガイドへの HTTP リ ンク。 トリプルドットボタンを押すと、指定されたページを既定のWebブラウザで開きます。
あなたの記録のためだけで、どこにも表示されません。
この値は、Rocrailによってセットされる機関車が走行した累積時間です。
Or、OID、オブジェクトの識別名は、トランスポンディング、Lissy、RailCom、RFIDなどのような双方向通信システムで使 用されます。
RFID表記は、Rocrail 3460+で変更されました。CAN-GC4 RFID表記 を参照。
識別子とLocoアドレスが同じ場合、この項は空白のままにします。 (RailCom)
前回のメンテナンス時間。
時単位でのメンテナンス周期。
メンテナンス時間は、走行時間で設定します。
走行時間とメンテナンス時間との差がメンテナンス周期より大きい場合、このボタンの背景が赤くなります。
ロコがメンテナンスを必要とする場合locoTabのロコIDが赤になります。

ノートを作るためのフリーテキスト。
スロットルにショートIDの送信を有効にする。 スロットル番号は0~255の間で指定することができます。
詳細については、アクションを 参照。
ロコに関するアクションは 走行、停止、min、mid、巡航、max、ライト、F1-F28の動きやファンクションに関係している。
(関数は、リビジョン3192で追加された。)
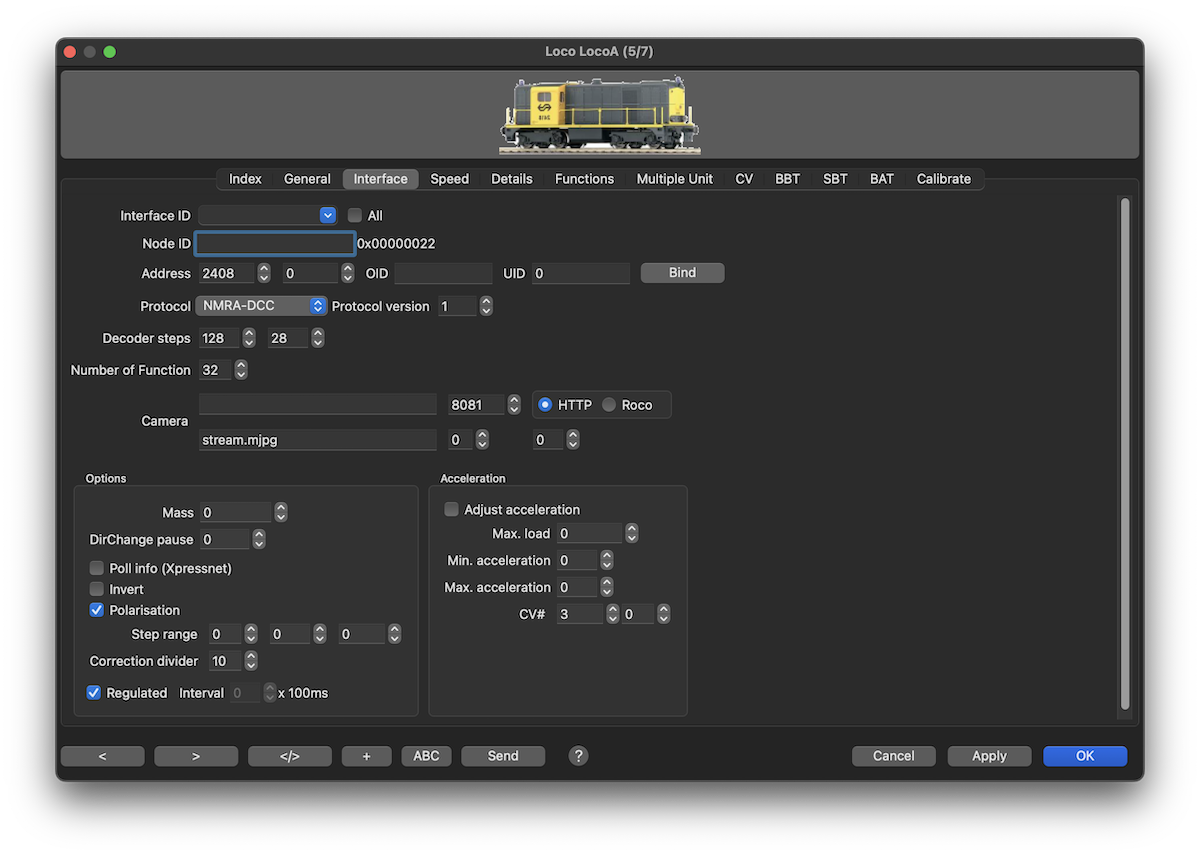
Addressing を参照
(以前の説明:Selectrixような一部のシステムでは、バスでデジタル出力を分割することができます。この使い方をするためには、バスの値を設定す る必要があります。 その他のシステムではゼロのままにして、機能しないようにします。)
デコーダアドレス範囲はデコーダの種類と基本のコマンドステーションに依存します。
あなたが2つ以上のCSを接続するような設定をした場合のみ、rocrail.iniに設定したIIDを設定します。
一部のコマンドステーションでは複数のプロトコルをサポートしています。詳細はユーザーマニュアルを確認してください。
アドレスに "0" をセットした場合、プロトコルは Track
Driver がサポートするアナログに設定されます。
コマンドステーションがデコーダタイプ自体を判別できない場合は、ddx-en またはSRCPの説明を参照してそこに記載されているバージョンを指定する必要があります。 CSに直接設定されているか、または1つ1バージョンだけのサポートなので、ほとんどのシステムではこのパラメータを使用しません。
使用デコーダでサポートされている拡張ファンクションの数。
デコーダに設定しているスピードステップ数。例えば、Rocrailは、パーセントまたはKM / Hで所望の速度を算出するので、デコーダのスピードステップ数が必要です。
これは、機関車の現実的な最低速を設定すべきで、オートモード走行中の pre2inイベントで使用されます(センサーとブロック参 照 )。
V_mode(下記参照)の設定に応じて、km / hまたは%での値である。
V_Rmin:これは機関車が後進時の速度として設定します。ゼロのままにするとV_minが使用されます。
これは、機関車の中速度とする速度を設定する必要があり、オートモードで走行時にenterイベントで使われます。
V_mode(下記参照)に応じてのkm / hまたは%での値である。
V_Rmid:これは機関車が後進時の速度として設定します。ゼロのままにするとV_midが使用されます。
ゼロより大きな値を設定した場合に、これは機関車の巡航速度V_maxの80%の代わりに使用される
V_mode(下記参照)に応じてのkm / hまたは%での値である。
V_Rcru:これは機関車が後進時の速度として設定します。ゼロのままにするとV_cruが使用されます。
V_maxはV_mode(下記参照)に応じて異なる2つの意味があります:
V_Rmax:これは機関車が後進時の速度として設定します。ゼロのままにするとV_maxが使用されます。
1)後進時の速度設定は自動モードのためだけのものであり、スロットルや他のマニュアルコントローラには適用されません。
このオプションは、デフォルトでは非アクティブで、グレーアウトされています。 それは、昔ながらの速度調整機能のないやMASS機能をシミュレーションして提供するデコーダで使用することができます。
V_stepは、100ミリ秒単位の値で、デコーダステップを1つ(実際は
10%単位)増減する時間として使用されます。
現代のデコーダでは、このパラメータは不要でゼロにしておく必要があります。
| 注目 :このオプションは、128のような多くの速度ステップで使用するとネットワークトラフィックに負荷がかかります! |
V_Mode は %(パーセント)またはkm / hのどちらかに設定します。
チェックボックスをチェックするとパーセントモードになり、速度はデコーダ最大ステップのパーセントで表されます。 50%がデコーダステップ14に等しいのに対し、例として28デコーダの手順を提供しデコーダで、100%は、デコーダステップ28に等しい。
チェックボックスパーセントのチェックを外すと、km/hのモードになります。
これはCSディナモの組み合わせでアナログロコがある場合にのみ使用することができます。 (マニュアルを参照してください。)
デコーダはモーター管理(BEMF)が搭載されている場合は、このフラグは、機関車が勾配ブロックと定義されたブロックに入ったときの Rocrailによる速度変更を防ぐために設定します。
このオプションを無効にすると、V_step(上記参照)と勾配区間での自動速度制御をアクティブにします。
XpressNetの ようないくつかのバスシステムは、スロットルが発行したロコの変更を伝播しない。
ロコが自動モードになっていない場合は、このオプションをアクティブにすることによって、Rocrailクライアントを更新するために必要な 実際の情報を取得するための要求を毎秒コマンドステーションに発行します。
ロコが間違った方向に走行する場合、このフラグを反転します。デフォルトは、箱から出るロコの走行方向を意味し、一部の古いデコーダは、電源 を切った後は 短時間だけ方向を覚えています。デコーダが以前の方向を "忘れ"たとき、次に走行させる場合にそれを "デフォルト"の方向とします。 またRocrail方向を読んでください:
いくつかの古いデルタのようなデコーダは、方向切換えと最後のポイント操作コマンドの間にある間隔が必要です。
DDXの実行中では、約100ミリで、これは旨くいくでしょう。
トン単位でのこの機関車の最大負荷。
CV3の範囲はゼロとmaxの間の負荷のために使用する。
20130723.090557.995 r9999I cmdrD000 OLoc 2707 processing cmd="assigntrain" for [E03] 20130723.090557.995 r9999I cmdrD000 OLoc 2848 consist [train1] assigned to loco [E03] 20130723.090557.995 r9999I cmdrD000 OCar 0354 car [test] loaded weight [500] 20130723.090557.995 r9999I cmdrD000 OLoc 2026 loco [E03] adjust acceleration: CV3=16 20130723.090557.995 r9999I cmdrD000 OVirtual 0437 program cmd=1 mode=0 20130723.090557.995 r9999I cmdrD000 OVirtual 0465 POM: set CV3 of loc 1003 to 16... 20130723.090557.995 r9999I cmdrD000 OLoc 2079 loco [E03] train length=56 weight=500 |
Block Brake Timer: enterか
らinの間でリニアに減速するようブロックのブレーキ時間を自動計算。
BBTパネルに移動
LocDialog詳細設定タブ。

秒単位の時間で、ブロックの待ちがLocに設定されている場合にこの待ち時間が使用されます。
 他のイベントを越えてしまうのを避けるために、可能な限り小さなタイマ値で注意して使用!
他のイベントを越えてしまうのを避けるために、可能な限り小さなタイマ値で注意して使用!
enter2inセンサが使用されている場合、enterとin
イベント間のミリ秒単位の遅延時間ですロコのイベントタイマがゼロに設定されている場合、またはフォース・ブロック・タイマが
選択されている場合は、ブロックのイベントタイマが使用されます(参照: ブロックルート )。(enter2inセンサだけでなく、inセンサのイベントタイマとしても同様にこの
タイマが機能する。)
このプロパティは、リビジョン1573で実装されています。 値は%で指定します。0以外のタイマ値を使ってinま たはenter2in イベントが発生した場合、タイマ値がこのイベント補正の割合で補正されます。この値を調整することにより、すべての機関車が所望の場所で停止するように 個々のLocoの停止特性を補正することができます。詳細については、ブロック→ルートのイベントタイマを参 照。
(ブロック側のタイマが使用される場合のみ機能します。すなわち、上記イベ ントタイマが設定されている場合は、ブロック 側のタイマを使うように指定する必要があります。)
行先ブロックが見つからない場合、ブロック待ち時間に掛ける係数として列車の優先度が使用されます。 デフォルトの優先度は10です。
列車が通常のブロックの待ちが設定されていない場合に、次式と表は待ち時間の優先度値の影響を示します。
(4518 +)
| 一時停止(ミリ秒) |
|---|
| (10 + 2 *優先度)* 100 |
| 優先度 | 最小待ち時間(ミリ秒) |
|---|---|
| 0 | 1000 |
| 1 | 1200 |
| 5 | 2000 |
| 10 | 3000 |
優先度が高い(値が小さい)ほど、よりCPUパワーが使用される。
他のイベントを越えてしまうのを避けるために、可能な限り小さなタイマ値で注意して使用!
方向転換コマンドが発行された場合、デコーダの種類によっては突然ロコが停止してしまうことがあります。
このオプションで指定されたミリ秒数だけ実際のコマンドを遅らせることができます。
リビジョン5164以降、このタイマーは同期され、他のイベント処理をブロックします! よりよい解決策は、デコーダを交換することであり、このタイ
マーを使用しないことです! リビジョン5369以降、ロコスワップタイマーがゼロに設定されている場合には、スワップは、終端駅における"inイベン
ト"で直接実行される。
起動時にこのツアーを開始します。
このオプションのIDは、常に同じツアーを実行する列車用で、手動で設定し保存します。
起動時にこのスケジュールを開始します。(ツアーが何も選択されていない場合。)
このオプションのIDは、常に同じスケジュールを実行する列車用で、手動で設定し保存します。
機関車を通勤列車として使用する場合は、このフラグが必要になります。通勤列車は許 可のあるブロックにのみ進入することができます。
ブ ロックサイドルートを使用して、終 点で通勤列車以外停止 オプションを無効にしている 終端駅と して定義されたブロック間をもっぱら移動する列車のためにだけオプションは必要とされていません 。(???)
ただし、ブロックサイドルートでは、通勤列車だけは、終端駅以外のブロックでの方向転換が許可されます。 この場合のブロックは、通勤列車と方 向転換が許可されていなければなりません。
より詳細は通勤電車のセットアップページに記載
されています 。
この列車をスケジュールの出発時刻に従って走行させます。
このグローバ ルフラグがrocrail.iniで設定されていない場合、このオプションは、より良いスルー プットを取得するためのすべての個々の列車に有効です。インターシティ列車には有用なはずです。
短い列車がブロックで停止するように、このイベントを使用できます。
ブロックにshortinイベントが定義されている場合のみ使用可能。
短い列車がブロックで停止するように、このイベントを使用できます。
このオプションが有効になっている場合、機関車は、 単にマニュアルセットのルート上で実行されます。
詳細については、次を参照してくださいマニュアル操作のルート。
このオプションでは、各ブロックの設定とは無関係に、機関車のプロパティで指定した待ち時間を使用します。
設定した場合、行先が空くチェックをEnterイベント後から、inイ ベントに到達するまで継続します。この間に行先ブロックが空き使用可能になった場合は列車が停止することなく再び加速します。
使用には要注意。
100msごとにLocoの主な機能は、空きの行先を見つけようとします。(多くのCPUリソースを必要とします。)
ルックアップ周期はリビジョン4553から優先度に依存するようになります。優先度:0 = 100ms、優先度:10 =
1000ms
このロコはブ
ロック出発遅延を使用。
電気に設定され、ブロックタイプが "電化"でない場合、機関車は、このブロックに入ることはありません。 ディーゼルと蒸気機関車は現在評価されていませんが、ターンテーブルのような将来の発展のために研究されている。
タイプは、こ こに説明されているように、ブロックの設定や権限に応じて、新しい行先ブロックの選択に少なからず影響を 与えるでしょう 。

ロコ制御ダイアログでもツールチップとして使用する、デコーダのファンクションを説明するフリーテキスト。各ファンクション項目の右側にあるト リプルドット [...]ボタンを押すと、イベントダイアログが開きます。あなたが単にツールチップを使いたいだけなら、イベントはオプションですが、使用 しないでください。
ファンクショングループを選択するには<FgとFg>ボ
タンを使用します。
| グループ | 範囲 |
|---|---|
| 1 | 1~4 |
| 2 | 5~8 |
| 3 | 9~12 |
| 4 | 13~16 |
| 5 | 17~20 |
| 6 | 21~24 |
| 7 | 25~28 |
ファンクションの簡単な説明、 モバイルクライアントのボタンに収まるように簡易にしてください。
ここは、このファンクション定義を有効にするために必須です。 記述がないと(そのファンクションの)他のすべての設定は失われます。
タイマボックスを使うとファンクションを自動的にオフにすることができます。ゼロより大きい値なら、その時間オンになります。ゼロのままな ら、イベントまたは手動操作でオフにするまでファンクションがオンになります。
ファンクションイベントピッカーダイアログ。

機関車を自動モードで実行しているときのみファンクションイベントが機能します!
このファンクションをオンかオフにイベントで起動するためには1つ以上のブロックを選択します。
あなたがsensors_and_blocksで 知るすべてのイベントは、ファンクションをオンかオフにトリガするために使用できます。(enter,in,exit)
走行(オン)と停止(オフ)のイベントを使用できます。ブロッ
クを選択する必要はありません。
ファンクションがオンの時に再生するサウンドファイル名を指定します。
完全なファイル名(name.extension)を定義する必要があります。
Rocrail
全般タブに、sound pathとプレーヤが設定されていなければなりません 。
ファンクションボタンに表示するアイコンファイル名; Rocview(3945+)とandRoc(371+)。
完全なファイル名(name.extension)を定義する必要があります。
ファイルの場所: IMAGE_PATH
ファイル形式:背景が透明なPNG。

|
セカンダリデコーダのアドレスにファンクションを割付けます。
LocDialog複数ユニットタブ。

複数のユニットのページでは、この機関車をマスタとして別の機関車をつなげることができます。
この機関車に送信されたすべてのコマンドは、ここで構成されたすべての機関車にも送信されます。
リストされているすべての機関車は、マスターと同じ速度で走行することを確認してください。おそらくプログラムトラックを使用してCVを微調整する必要が あります。
マスターが仮想機関車の場合、このページで構成されている本当の機関車の代用に使用することができます。 自動モードで特に有用なすべての参照、アクションなどは、1つ以上のメンバーに代用による効果はありません。
スレーブへの速度コマンドはマスターにリダイレクトされます。(3731+)
ライトは、マスタとは同期しません。
このオプションをチェックすると、すべてのスレーブのライトは常にオフですが、そうしなければ常にオンです。
マスタで選択したファンクションはすべてのスレーブLocoに発行されます。
|
サーバーループを防ぐために、マスタをスレーブユニットのメンバに含めないでください! |
ここで構成するものは、すべて 'スレーブ'機関車です。
リストのいずれかを選択して、削除することができます。
[追加]ボタンを押すことで、構成リストに機関車を追加します。

このタブには、この機関車用に保存されたすべてのCV値を示しています。
CVの説明はNMRA.org:http://www.nmra.org/standards/DCC/standards_rps/rp922.html
にあります。いつまでも、彼らがModifyコマンドで上書きしませんように。
これは Rev5422 から追加された機能で、inイベント時点で丁度 V-min となるようスムーズに減速する減速時間が調整される。従って、pre2in機能も併せ持ったものと解釈できるので、このBBT機能がなかった以前のバァー ジョンでpre2inを使用していたような場合には非常に有用だと思われる。 pre2inを使用しないinイベント用のセンサを配置したレイアウトでこれを使うと、折角のinイベント用のセンサが元の位置のままでは停止位置がそれ までより可也手前になってしまうだろう。センサ位置を変えるか、タイマによる停止位置の調節が必要になるだろう。
また、ブロック単位の調整のため進入方向に関係なく調整するので、双方向に 走行する ブロックでenterとinセンサの間隔が両方向とも同じでないと当然時間が違うので調整が狂って来る。(その後、直前のブロックも参照 して別インターバ ルとして扱えるようになり、この問題は回避できるようになった)センサ・車載デコーダ ー Loconet ー コマンドステーション ー PC の各所でのタイムラグや機関車を含めた走行環境の影響による誤差はある。 BBTによる減速は、デコーダの減速率など機関車自身の減速より遅くないと全く意味がなくなるので注意が必要。
Rev5444
から設定項目が増えた。inセンサが検知する時点で余裕をもって定速になるようにすれば可也停止位置精度が上がる。インターバルタイムがある程度確定した
ら、補正が働かない"Fixed"にして手動で調整した方が良いだろう
Block Brake Timer:


enterからinまでリニアに減速するブロックのブレー
キ時間を自動的に計算する。

指定されたステップ数でBBTを有効にします。(4~16)
デフォルト値は10;範囲は10~100。
この値はBBTを最初に使用するときに、ステップ間の初期インターバル時間として使うものです。
差分がこれより大きい場合、この最大値を採用します。enterとinの間で列車が停止したか、または脱線したことによる使用できない値を 避けるためのものです。
デフォルト値は250(2.5秒)です。
ブロックで停車する度に、再計算します。差分のこのパーセンテージ分を補正値として使用します。
25%がデフォルト値で、これは良い選択であると判明しています。
ルート毎に分けてBBTを使用するためのもので、どのブロックから進入するかを指定します。
計算が行われるブロック。
BBT区間で減速を開始してから減速処理を終了するまでの 10ミリ秒単位の時間間隔。
これは、"enter" から "in" までの時間で、ステップ数によって分割されます。
実際に使用するステップ数。
Inイベントセンサー入力からInイベントを生成させるまでの時間。 Inイベント生成を遅延させることで停止位置調整を行うことができる。
このBBTレコードで計算した回数。
このBBTレコードの補正をせずに固定値にする。
監視が オフになっているとBBT更新が受信されません。この場合、[OK]をクリックしてダイアログを閉じると、既存のBBTラインを消去すること ができます。
選択したインターバルを修正します。
選択されたBBTの行を削除します。
すべてのBBT行を削除します。
計算値は、ロコ定義の子ノードとして以下のイメージでブロック毎に保存されます::
<bbt BK = "601" interval = "817" /> <bbt BK = "501" interval = "1145" /> <bbt BK = "602" interval = "746" /> <bbt BK = "502" interval = "619" /> |
インターバル値はenterからinまで10ms単位で計算されます。

{kind=link}