親愛のしるしは攻撃の合図-16 fire!-16
引き続き尻尾を動かすギミック部品を作ります。
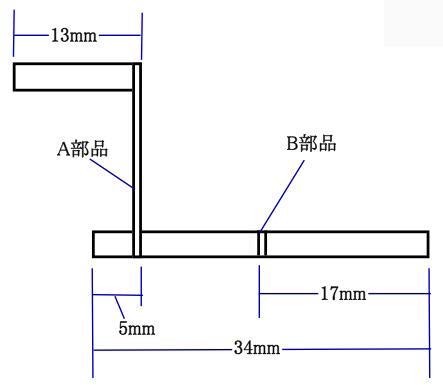
左後ろ足から動きを取り出す部品を作ります。便宜上A部品とします。
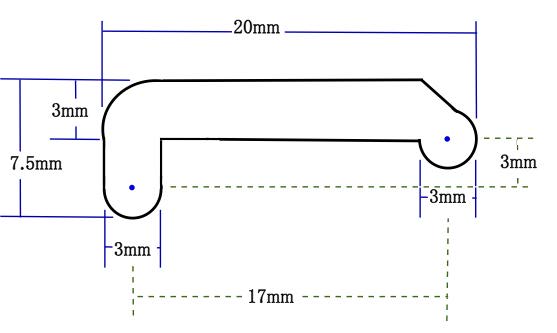
寸法を測った結果、上図のような形状を出すことになりました。図面は、左側面から見ている状態で、左側が前方で右側が後方です。後方の3mm円状の部分が前頁までに作ったギミック部品と3mm軸で直接つながります。前方の3mm幅の部分に、左後ろ足から動きを取り出すために3mmの軸を取り付けます。
ギミック部品は形状も大事ですが、3mmの軸と動きの取り出し口それぞれの中心が、高さで3mm、前後で17mm離れていることが大事です。
|
|
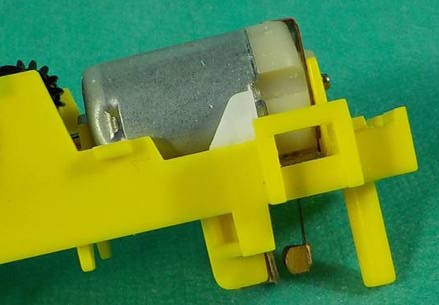
図面に従ってA部品を作ってみました。 強度確保の観点から、プラ板を2mm程の厚さにしてからの部品を作ることにしました。 A部品前方の左後ろ足から動きを取り出すところは、2mmのプラ棒を固定し、そこに3mmのプラパイプをかぶせてから整形しました。後方は、まだ2mmの穴を空けてあるだけです。これから、現物あわせで、前頁で作った部品との取付位置と角度を割り出します。 |
|
|
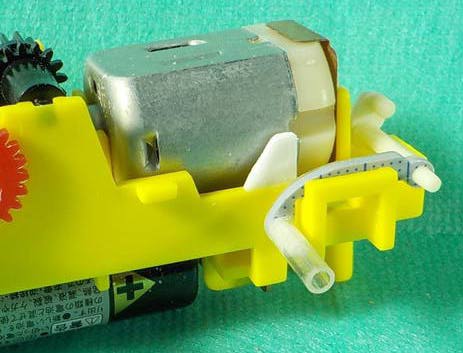
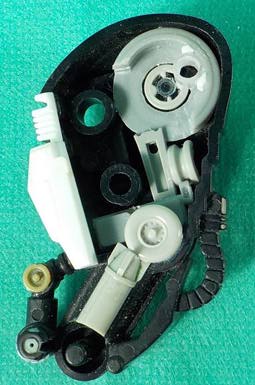
取付位置、左右の場所は、自然と決まってきますが、取付角度は現物あわせで見つけださなければなりません。ここでは取付角度を測ることが出来ませんので、角度を言うことが出来ません。現物あわせをする場合の基準は、左足がA部品を動かしたとき、動きの伝わるB部品の軸の中心とC部品を支えるジョイント軸の中心を直線で結んだ線を基準に、左右に均等に振れるような位置が最も動きを大きく取り出せる位置です。そうした動きを取り出せるA部品の位置を見つけだします。 左の画像は、まだ仮組みの途中ですが、ほぼ完成の形です。まだ、一部3mm軸側のプラパイプが接着していません。この後、A部品を接着し、3mmパイプを差し込んで整形して出来上がることになります。 |
|
|
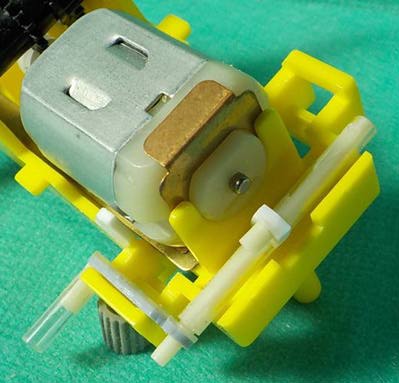
パワーユニット側にも一部に部品を継ぎ足します。 ギミック部品、A部品が内側に押されて引っかかってしまうことを防ぐためのガイドの役割を果たさせます。 |
|
|
A部品の最先端部分さえ曲がらなければ、引っかかることはないでしょう。
手間でも、プラ板は少し外側気味に接着し、その後パワーユニットとなじむようにヤスリやサンドペーパーで段差を無くしていく方が、引っかかりの無いガイドになります。手間を惜しんで、ギリギリで接着してしまうと、内側気味に接着して段差が出来てしまいガイドの意味が無くなってしまって、更にプラ板を貼り足す二度手間になってしまいます。 |
|
|
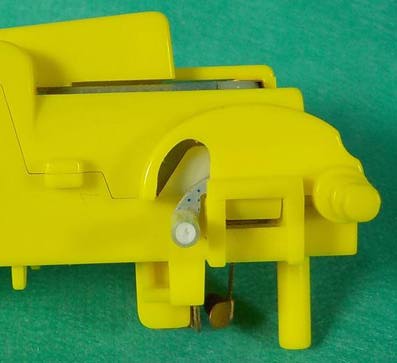
作ったギミック部品は、こんな感じにおさまります。動きの取り出しと伝わり方はわかると思います。尚、左の画像のギミック部品は接着して固定する前の状態です。 |

|
ギミック部品の通り道を作るため、パワーユニットの上蓋の左後ろ足部分を切り込みます。かなり大きく切り開いていますが、組み上げてしまえば足に隠れて見えなくなってしまいます。試作段階でギミック部品を壊してしまわないようにするためには、予め大きめに開口しておくのが無難です。
プラ板で作ったガイドはもう少し大きい方が良かったかもしれません。 |
|
|
ギミック部品に合わせ、左後ろ足部品の内側に、5mmのプラパイプを固定します。
5mmのプラパイプはただ接着しただけではなく、周囲何カ所かに支えをつけています。実際に少々位置を間違えたようで、動かしてみて、丸ヤスリでパイプを内側を少し削って調整しています。 |
|
|
現物あわせをしながら、パワーユニットにも必要な加工をして、最後に寸法を測ってみたところ、およそこんな位置関係となりました。図はあくまでも目安であり、最終的には現物あわせによる調整が必要です。 A部品とB部品は取付位置だけでなく、角度が大事なのですが、手持ちに角度を測る良い測定具がありませんでしたので、角度を測ることは出来ていません。A部品が、ほぼ水平になった時が左足を最も後ろに下げた位置と想定しています。それを目安に取付角度を決めることになります。 |
ギミック部品が出来ましたので、実際に組み上げて動かしてみます。
|
|
関係する部品を組み上げ、前足から動きを伝えるギミック部品を取り付けます。 左後ろ足は、3つの軸を同時にかみ合わせなければなりませんので、組み上げづらい所です。 |
|
|
左後ろ足が後ろに下がると尻尾が持ち上がります。 |
|
|
左後ろ足が前に出ると尻尾が下がります。 |
他の部品が組み上がっていないのでわかりづらいのですが、前足のクランク部分から動きが伝わっています。前足のクランク部分からギミック部品によって左後ろ足を動かします。左後ろ足が、作ったギミック部品を動かし、作ったギミック部品が尻尾に動きを伝えます。





{kind=link}