--> ホーム --> パソコンによる自動運転
| 新規作成 2013.4/25 |
| 最終更新 2013.10/2 |
コンテンツ → オブジェクト → センサ
レイアウトからのフィードバックは、制御プログラムが得ることができる最も重要なものの一つです。 電車がセンサを通過することによって活性化されコンピューターに信号を送ります。
Rocrailは、センサを使用してレイアウトを制御するために列車がどこにいるのかを知ります。
実際の鉄道でも、職員が列車が路線上のどこにいるかを知り、制御できるようするという同じ目的でセンサを使用しています。
センサーなしのデジタルレイアウトでは、Rocrailによる自動モードでの運転はできません。
このケースでは、Rocrailは手動で機関車や分岐器を制御するのに使用できる別のスロットルでしかありません。
センサによってRocrailが自動的に列車を実行できるようにすることで、レイアウトに楽しさの新しい段階に入ります。
- 自動モードでの列車検知。 Rocviewは列車がいるブロックやどこに移動しているかを表示します。
- 電気的な占有検出。 Rocviewは列車や車両が通過することによってセンサを起動したとき表示されます。
- 双方向。
RocrailはLissy、Barjut、RailComやデジトラックスのRX4によるトランスポンディングのような技術を使用して、ブロック中の機関車や車両の識別子を使用できます。
- 押しボタン、トグルスイッチでアクションを起動することができます。
-
Short IN Eventで短い列車をプラットフォームの途中で停止させられます。
- 分岐器
- 信号機
- ルート
- ブロック
- システム
- 外部スクリプトまたはプログラムの実行。
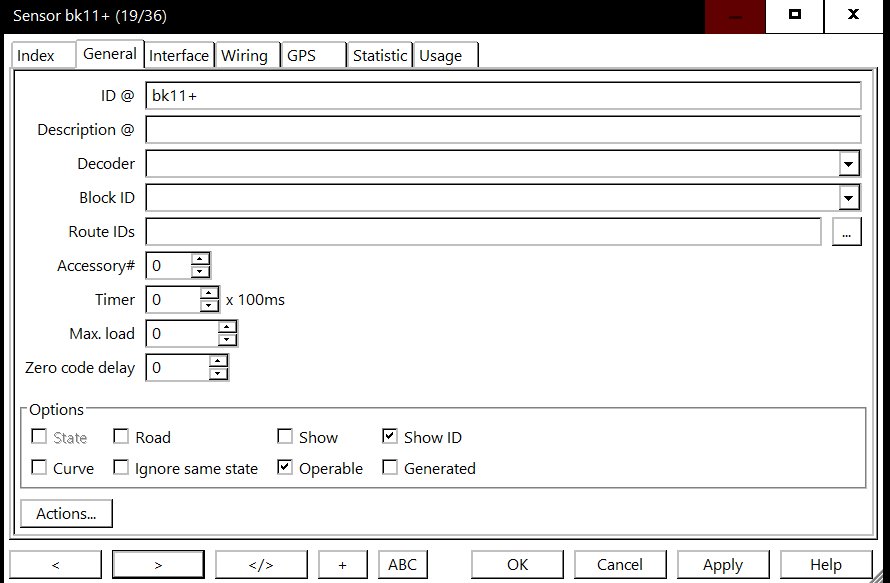
全般
SensorDialog全般]タブ。
ID 番号
IDは、Rocrailがプログラム全体で使用するセンサを参照するための一意のキーであり、そのため非常に重要です。 IDを変更した場合は、ほとんどの場合、そのセンサを使用しているか、定義したブロックやターンテーブルを編集する必要があります。
Block ID ブロックID
センサシンボルが占有表示を持っている場合、センサをブロックまたはセンサ(シンボル?)にリンクすることによって有効にできます。 通常、それが属するブロックにリンクします。
Route IDs ルートID
ルートIDは、シンボルが見つからなかった場合は、ルートの状態表現やOCC(Operational Control Centres)を使用してルートのロック状態を示すためのものです。
これは、ホワイトスペース(空白)なしのコンマで区切られたルートIDのリストです。 ルートIDのいずれかがロックされると、ルートの状態表現で表示されます。 (ロックとは予約または占有されている状態を言っていると思われる)
Description 説明
表示のためのみのフリーテキスト。
Road 道路
この属性がチェックされている場合は、このセンサのシンボルが道路のテーマから取得されます。
State 状態
チェックがオンであればセンサの現在の状態。
Curve 曲線
センサートラックを曲線表現にする。
Visible 表示
線路プランにセンサを表示します。 ターンテーブルセンサのようないくつかのセンサは表示できません。
Actions アクション
詳細については、アクションを参照。
センサオブジェクトは、アクションコントロールの状態値として使用できる占有カウンタを持っています。 このセンサに定義された任意のアクションが実行された場合、このカウンタがゼロにリセットされます。
Timer タイマー
100ミリ秒単位のOFFディレイタイマ;範囲= 0~20。
通常のセンサレポートではデフォルトのゼロです。
このオプションは、自動フラグRocrail " 時限センサ
"に依存します。
SensorDialog Interface]タブ。

Interface ID インタフェースID
複数のコマンドステーションを持っている場合は、実際にCSに配線したセンサーをそのCSとリンクさせるためにこのフィールドを使用します。
CSを1台だけ使っている場合、または既定CS (rocrail.iniの最初の行) に配線している場合には、空白のままにします。(実際のCSがあっても仮想CSは使った方が良いので可能な限り空白は避け他方が良い)
Bus バス
アドレッシング Addressingを参照:
Address アドレス
アドレッシングAddressing章で説明したように、Rocrailではセンサーはフラットアドレスで使用します。
Cutout切り抜き
このセクションのショートカットを検出するためのオプションのカットアドレス。
ショートカット上のサーバのメッセージ:
| 20120617.082116.315 r9999E cmdr1016 OFBack 0367 Sensor [fb3b] report: SHORTCUT detected |
Rocview:

Typeタイプ
| 値 |
Type |
メニュー |
備考 |
| 0 |
Current sensors |
|
|
| 1 |
IR Lissy |
Uhlenbrock |
非占有にするためオフタイマと併せて使います |
| 2 |
Transponding receivers |
Digitrax |
|
| 3 |
Barcode |
BarJut |
|
| 4 |
RailCom |
BiDiB, Lenz, ESU, Tams |
|
| 5 |
RFID |
MERG, LDT |
|
| 6 |
Wheel counter |
GCA173 Hall
Sensor, MGA141 |
|
このトピックのより詳細については、 Bi-Directional Communication を参照してください。
Options オプション
Active low アクティブLow
反転信号になっているセンサをこのオプションを使用して元に戻すことができます。
Reset リセット
リセットカウンタイベントのある" ホイールカウンタ "のタイプの場合には、このセンサーに使用したのと同じアドレスを使用してリセットスイッチコマンドを送信します。
Wiring

CTC
このオプションは、CTCのパネルとセンサーを同期させることです。
アドレス情報は、デコーダの出力を制御するために使用されます。
LocoIOは、"占有検出"出力とセンサーをリンクすることができますのでこのオプションは必要ありません:
Switch スイッチ
通常、出力コマンドが送信されますが、このオプションをチェックすると、スイッチコマンドを送信します。
Bi-Directional Communication 双方向通信
Standards規格
http://www.nmra.org/standards/DCC/
RailComはNMRAのRPおよびRP 9.3.1 9.3.2に従う。
RailComの技術は、米国では知られてないか/無視されているようだ。 トランスポンディングは、アメリカではよく知られている双方向通信技術であると思われる。
| DCC電源を通して情報を逆に送信しようとするあらゆる方法は、問題をはらんでいる。 RailComはこのもう一つの例です。 (MERG) |
| 技術 |
良い点 |
悪い点 |
装換可 |
PoM CV-read |
有効な時期 |
| Barcode reader |
|
|
Yes |
No |
- |
| RFID |
簡単で、追跡する車両すべてにトランスポンダを入れても安価
|
通信の制限2、IDはenterのみ |
Yes |
No |
- |
| Digitrax Transponding |
LocoNetの標準,
'Listening' by wire1. |
トランスポンダの受信機の取付けは、特別な注意が必要です。 非常に信頼性がありません。 |
No11 |
Yes, tested |
1997 |
| LISSY |
LocoNetの標準, インストールが簡単, open protocol. |
通信の制限2、enter情報のみ |
Yes |
No |
2004 |
| RailComR |
NMRA RP 9.3.1??? |
新しいDCC機器と報告のためのPCインターフェースの追加が必要 ,
セクションごとに制限され、
セクションは最長の機関車3の2倍の長さが必要です 。 |
No |
Yes |
2010(Tams)
2011(OpenDCC/BiDiB) |
| Selectrix/Mut |
|
Selectrix and address only. |
Yes |
No |
- |
| RaiComPlusR |
Comment (DE) |
No |
? |
? |
|
1)バウンドする検出セクション(
Bundling detection sections)で、非常に柔軟性があり、 "無制限"です。
11) トランスポンダがないデコーダでは不要なイベントが発生し、DigiTrax唯一のソリューションです。
2) データ転送は瞬き程度で可能です。
3) 列車の両端で検出用電流が必要で、H0スケールで1メートル以上が必要になる...詳細については、
RailComDisplay page from Pacoのページを参照してください
PoM CV-Read POM CV-読み取り
POM=本線上のプログラミング、OPS(Op eration s Mode Programming)とも呼ばれる。
- 非常に高速で、ポーリングなしだが直接に答える。 Very fast, no polling but
direct answer.
- CV-リードに興味があるだけなら、たった1つのトランスポンダの受信機がレイアウト上にあれば良い。 (トランスポンディング)
Manual Mode手動モード
- ident codeを参照するか、テーブルに一致するロコIDがあったらクライアントでそれを参照してください。
- ロコと一致する場合ブロックを予約します。
Auto Mode 自動モード
- ident code がブロックを予約したロコで間違いないか確認。
- identコードが定義されたロコと一致して、半自動モード;half auto modeが許可されているブロックであれば、そのブロックを予約する(下記の制限付きで) 。
- identコードが異なる場合は、報告されたidentコードに対応するロコで占領ロコを置き換えます。
- ブロックが空の場合は何も起こりません。
- 他のすべてのケースでは幽霊列車として報告する。
Accept Ident Identの受け入れ
ブロックの状態が "identを受け入れる"に設定さいると、それは予約も占有もしない:
- identのコードが報告されるまでブロックシンボルは緑で表示します。
- この状態では、走行中のlocoで自動的にブロックを予約することはありません。
Sensor types センサの種類
(一部分のみの訳です)
センサーはRocrailの"目"であり、自動モードで列車を実行できるようにする。
センサーは列車がそれらを通過したときトリガー(または"センス")するデバイスです。それらは、絶縁した線路によるシンプルなもの、レイアウトに埋め込
まれた磁気スイッチ、遮るとトリガされる赤外線、列車が通過する時に車両の底のバーコードを読み取るバーコードリーダーです。
Rocrailは、列車を自動的に制御するためにセンサ情報を必要とします。 これは、Rocrailがレイアウトのどこに列車が到達しどこに向かうかを、どう"知る"かということです。
センサーは、さまざまな種類があり、どれを選択するかはあなたのシステムとあなたが望む信号系の種類によって異なります。
車両があるレールと別のレールを接続したときトリガーするセンサ、ワゴンの底面の磁石がその上を通過するときトリガするセンサ、機関車や車軸に抵抗をセットした車両を使って線路に電流が流れたときトリガするセンサなどがあります。
フィードバック型センサのすべての種類は、イベントとしてRocrailで評価することができる状態変化の検出を可能にする。
A couple of designs(接触線路や電流センサ)は、この状態の全期間で全トラックセクションの占有の分析を可能にする。 このフィードバックは、 トラックの占有検出器として使用することができます。
デザインによっては(スイッチングトラック、リードスイ ッチ、赤外線検出器、バーコードリーダ)制限があったり、トラック占有検出器として適切ではありません。なぜなら、線路区間全体を見ていなかったり、変化だけか特定の車両を検知できません。
しかし、すべてのセンサ方式は、同じ2つのものを含みます
- フィードバックセンサは、列車が通過し接続されたエンコーダにこれを送信すると、レイアウトの1つまたは複数のセクションで検出します。
- エンコーダは、センサがトリガーされたときにRocrailに情報を報告します。
例えば、メルクリンで使用されるS88帰還バスのような古典的な方式は接触レールに基づいている。
Sensor Schemes センサー方式
ここ項には、目新しい内容が無い様なので割愛します。
興味がある場合は、原文を参照してください。
このセクションでは、Rocrailがセンサイベントをどのように使用しているかについての概要を提供します。 センサの様々な組み合わせの可能性についての詳細な説明は、センサーとブロックSensors and Blocksページ上にあります。
ブロックあたりのセンサ数は1と5の間で変えることができ、一般的にセンサーの増加によってより良い結果が得られます。 各センサーは、列車に関し次の動きをどうすべきかを決定するためRocrailによって使用されるイベントを生成します。
最も簡単な解決方法の 1つは、単一のセンサ(enter2in)の使用です。 しかし、この簡単な解決策の欠点は、少し不器用な列車の運転です。
2センサーでの運転はよりエレガントになります。列車は第一のセンサーを通過した場合(enter)それは通過するか、停止しなければならないか否かが判
定されます。後者のケースでは列車がロコモーティブのプロパティでセットされたV_midのスピードに減速されます。
列車が第二のセンサー(in)を通過した場合停止に減速されます。
第三センサー(exit)で列車の正しい停止を監視することができます。 列車がenterとinでは停止しない場合、または遅すぎて例外が反応した場合( "Ghosttrain")が生成され、それによって全体が停止されます。
ブロックが双方向で使用されている場合、それぞれの方向のenterセンサは、逆方向のin機能を持ちます。また、逆(inセンサ)もまた同様です。
自動モードでは、Rocrailが行先ブロックのinイベントを受信するまで、機関車の開始ブロックは解放されません。行先がブロックBである機関車がブロックAを離れる場合、機関車がブロックBのinセンサーに到達するまで、block Aは解放されません:
以前に一旦解放され、ブロックにこれ以上のセンサーが占有を示さなければ、ブロックはロックすることができます。
未使用のブロックセクションは、ブロック占有(占有済み)を知らせるために、電気的に結合されることができます。
機関車がブロックAを離れてブロックBでinイベントがトリガされた場合、1つ以上のセンサーがアクティブである場合にはブロックAは解放されません。
これは事故で連結が外れた結果として、見失った車両の認識に非常に便利です。 このような見失った車両は、Rocrailが見失った車両がいるブロックに列車を送る前に停止させるために占有センサーが引き金となるでしょう。
[バージョン:2010-03-12]