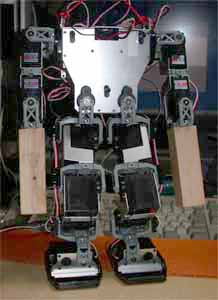
| 2008のKONDOバトル向けに設計、家族用実戦機として運用されていた小型機体です。主に、rsv3の相手させるために余りサーボ+αで製作したのが始まりです。 諸事情でキーパーは卒業しましたw 次なる出番を模索中・・・ |
 |
2012.1.7
2012.1.8
| 一発芸でボール投げをやってみたかったので参加、ウケもいまいちだったし、これが投げ収めかな? |
2010.10.3 KONDO CUP#22 OPEN CLASS 2位
2010.6.6 KONDO CUP#20 OPEN CLASS 優勝
| robo-oneサッカーで投げを失敗していたので、今回は投げを徹底的に設計、調整しました。 前回はボールの掴み方で軌道が変わってしまい実用にならなかったので、今度は、どう掴んでも大丈夫なように掌の構造を設計、調整。ボールの軌道を計算して、より遠くまで飛ぶように設計、調整。半年以上前から思い続けていた理想のスローインを目指します・・・ 今回も出張続きで実戦練習ができなかったのでフィールドでの直前調整、予想より飛ぶようで直接ゴールを強襲してしまうのでストレッチを下げてゴール手前に落ちるようにして試合に挑みます。結果は、予想を遥かにしのぐ効果で久々(3連敗していました、9ヶ月ぶり)に優勝できました。 参加者の皆様、オフィシャルの皆様、ありがとうございました。 |
ロボット・バスケットボールに挑戦 余りに良く飛ぶので、どのくらい高く上がるのか実験してみました。高さ2mのバスケットゴールを目指します。(画像をクリックすると再生します) |
2010.5.22 ROBO-ONEフェスティバル ROBO-ONEサッカー#4 優勝
| robo-one規格に対応すべく「さくら2号」の足を上げ底にして伸ばし、腕のサーボの配列を少し変えて、KONDO-CUPの時と同じ初速で投げられる様に改造してみました。前回は電池切れで失点したので新品の電池を4個購入。なんと、飛距離が一気に1m伸びました! 最近、「さくら2号」の歩行が遅くなったなと思っていましたが、歩行速度も150%(当社比)になりました! どうやら諸悪の根源は電池の老朽化にあったようです(笑) でも、練習不足か「投げ」は真上に飛ぶばかりで実戦では役立たずでした(^^;) 練習では上手く投げられるんですけどね〜 今度のKONDO-CUPでリベンジ! |
2010.4.25 KONDO CUP#20 OPEN CLASS 2位
| 以前から考えていたこと(機体構造)を少しずつ現実化へ・・・ 手のひらを投げやすい構造に変更してみました(さくら2号のトレードマークが1つがなくなったけど)。煮詰めていない割には飛ぶようになったかな? でも、ビジョンは、まだまだ先かな〜 順位は2位で終わりました。ほぼ定位置な模様(^^;) |
2010.2.28 KONDO CUP#19 OPEN CLASS 2位
| on PCのために部品取りしてしまったので、肩と腕のサーボを2350に戻しての参加でした。 前のモーションが使えるので、多少は投げられるようになりましたが、腕の取り付け向きを間違えていてボールの保持が上手くいきません(^^;) 結果的にそれが起因して決勝で1失点で敗退、連敗となってしまいました。 連敗したら、ガーゴイル復帰と以前書きましたが、既にサッカーのできるガーゴイルは居ません(^^;) 大型機ができるのは夏ごろかなあ? (笑) |
2009.12.27 KONDO CUP#18 OPEN CLASS 2位
はじめての仕様変更です。予備の無い腕の2350HVを予備品の豊富な4013に変更しました。なんだか「いかり肩」になってしまい可愛くないです(笑)
次回の課題は計画しているモーションの完成、何時開催か不明ですが多忙な時期に重なりそう・・・ 連敗したらガーゴイル投入予定 |
2009.11.23 名古屋モ−ターショー 無差別級 ロボットバトル 3位
| 翌日から愛知県に出張だったため、ついでに名古屋モーターショーの無差別級ロボットバトルに参加してきました。仕事なので荷物を増やせず、無差別級なのに小型な「さくら2号」で参加です。 さすがモーターショー、観客数が凄かったです。観客の乗りも思いのほか良かったのが印象的でした。「さくら2号」は目立つせいか結構声援を貰っていたようです。 学生の機体が大半だったようですが、なかなか個性豊かなロボットが沢山いて楽しかったです。「さくら2号」は大型機には通常攻撃(投げ技以外)が余り効かないのを痛感しつつ、なんとか3位を貰いまいした。 参加者の皆様、スタッフの皆様、お疲れ様でした&ありがとうございました。 |
2009.11.1 小金井祭第2回ロボットバトル 5位
| メインオペレータが参加できなかったので、久々にメカニックの運転で参加しました。「できんのか5」に向けての仕込みをしていたので、大会の準備は電池の充電だけでした(^^;) おかげで、無線不調で度々ノーコンになる始末(^^;) 肝心のバトルでは、ノーコンでだんまりになってしまってタイム(ワンダウン)、挙句に肘のハイブリッドのサーボホーンが破断して棄権(初戦敗退)という結果でした。大玉ころがしのスコアが良かったせいか総合5位という成績が残せました。 参加者の皆様、スタッフの皆様、お疲れ様でした&ありがとうございました。 |
2009.9.6 KONDO CUP#17 OPEN CLASS 優勝
| 久々に「さくら2号」でのサッカーでした(それに前回は負けてるし)。レギュレーション上、ガーゴイルが(そのまま)出られなくなったので暫定的処置です。連敗したらガーゴイル復帰を計画中・・・ 機体がポンチョ(ROBO-ONEサッカー仕様)のまんまだったので、復旧作業に手間取ってしまい、仕様的には以前のまんまです。なんか、皆さん、スローインの飛距離がでるようになってます。さくら2号は手の構造上、投げモーションに肘軸を使えないので全然飛びません、次までには何か仕込んでおきたいな・・・ |
2009.6.7 第一回ニソコン(2足歩行ロボットコンテスト) 2位
| 日本科学未来館で行われた「ニソコン」に行ってきました。 今日のオペレータは迷うことなく(アスリート競技を除く)操縦できたようで初めての2位を頂きました。(振り返ってみると今まで3位ばかり) 午前中、アスリートコースで遊びすぎたのと、本戦では延長戦が多く(4戦中3回)バッテリ数不足で悩まされる羽目になりましたが楽しく遊べた1日でした。 人気投票ではキノピーに続いて2位だったようです。きっと普通のお客さんが入れて下さったんでしょうね〜 ちょっと感激! ありがとうございました! もうちょっと、デモを作りこんでいけばよかったかな〜 |
2009.5.17 ロボットフェスティバル09 本戦・初戦敗退
| 本人曰く、ロボットの動かし方を忘れたらしくて初戦から動きが悪かったです。「さくら2号」を触るのは「チキチキ」以来ですけどね、でも、いつもそんなもんだったはず? rsv3の操作系と混乱したのかな? 2戦目は(メカニックのアドバイスも聞かずに)自主的に動いてました。ようやく波に乗れたかなと束の間の安堵感・・・ 本戦というと、最初からシフトボタンを間違えて押し続けサッカーモーションを連発(^^;) 本人は、それに気づかずにパニック状態。結局、それに動揺してしまい全く動けず敗退しました。(robo-one準決勝と同じパターン) 勝敗を意識しはじめた現れなのかな? 慣れないとはいっても、経験1年余り、大会は10回位は参加してるハズ・・・ まあ、練習はしませんが(^^;) これで練習してくれるかな? |
 |
2009.5.5 ロボットプロレス できんのか3
| 詳細はrsv3のレポートをご覧ください |  |
2009.4.12 KONDO CUP#15 OPEN CLASS 2位
| 予備機体があるトリニティですが、今日は2台共に故障(^^;) 結局、決勝に敗れて2位に終わりました。 キーパーの失点としては2点、「さくら2号」のキーパーは、そろそろ潮時かな・・・ 小型機でのキーパーについて 「rsv3」を脚長改造(重心位置規定含む)したため動作が鈍くなってしまったので、機敏に動ける「さくら2号」をキーパーにしたのが始まりです。確かに前後左右自由自在、機敏なのですが、往年の「rsv3」のような瞬発力はありませんし、手を広げた時の守備範囲の狭さはオペレータにとって不安材料です。特に背が低く高さが無いので上がるシュートには無力です。 「さくら2号」の通産成績は、3トーナメント、10試合程度で4失点と、百戦錬磨の「rsv3」の生涯失点を越えてしまいました(笑) やはり小型機は、どんなに機敏でもキーパーには不利! (不利だけど無理じゃない) が結論です。次は大型機の「ガーゴイル」でトライしたいです。 |
2009.3.29 チキチキロボマッチ本戦 3位
| 前日まで、ちょっと所用があり何も手が付きませんでしたが、帰宅後夜なべで整備なんとか間に合いました。 最近、オペレータは全く練習しません(^^;) バトルはナガレンジャー以来です。こんなんでも、そこそこ動かせるんですよね。当然昨日仕込んだ新モーションは上手に使えませんが(^^;) メカニックが指示した動作は、ほぼ間違えなく行えるようです。たまにミスってダウンカウントを増やしますけど、ぶっつけ本番にしては上出来です。相手の試合も全然見てませんから、ほぼ反射神経だけで動いているんでしょうね・・・ とはいえ、練習すれば上手になるのかもしれませんが、あまりその気はなさそうです(笑) と、いうわけで、今回は3位でした。 |
2009.3.8 チキチキロボマッチ予選 予選通過
| とりあえず予選通過・・・ 次は29日です。 色々思う処が多い一日でしたが、思い残すのはダッシュ5000です、順位は変わらないけど・・・ デモ:ちょっと長すぎたかな? カメラのアングルがわからなかったけど、個人的にはロボットをどアップにしてほしかった。カメラアングルはどうだったの? ダッシュ5000:練習では8秒前半だった。足裏を専用化したおかげでめちゃくちゃ安定してました。転んだのは操作ミスです、止まると転びます(笑) なんで、あんな処で止まったのか! 気持ちよく走れたら「足裏の秘密」でも公開しようと思ったけど、また今度(笑) サイコロ:ちょっと遠慮気味に対戦しました。ほぼ、オペレータにまかせきり、凶悪なプレーも控えめに(笑) 結果的には、もちっと稼いでおいたほうが良かったかな〜 (これがメカニックの弱さ) キューブ:2個保持に失敗したけど、まあ、あんなもんでしょう・・・ サイコロといい、キューブといい、戦術的にはオペレータは上手でした。 ランブル:完全にオペレータにおまかせ、わんだほーの時もそうだったけどオペレータはランブルが余り得意ではありません。でも、サシではまけませんぜ! そうそう、今回のさくら2号は、認定権は狙いません! いちおう、明言しておきま〜す。 |
2009.2.14 KONDO CUP#14 OPEN CLASS 優勝
| さくら2号の2度目のサッカーでした。前よりは上手にキーパーができたかな? 今後の課題はゴールキックと、フォワードでのフィールドワーク。でも、次は、新機体でいきたいな〜 |
2009.2.7 第5回ナガレンジャー・ファイティングフェスタ BEST4(同一3位)
| 雪が見たいという家族の希望でエントリーすることになりました(^^;) 機体規格が13回のままなので認定取得は目指しません。仕様もモーションも、草加の時のまんまでした。 robo-one規格に対応しない理由: 一番の理由は面倒だから(笑) もともとKONDO-CUP仕様で設計しています。足裏はどうにでもなりますが、重心規定を対応するには新機体を作るほどの作業量になります。それに、少し大柄になる予定。「可愛いままで居たい!」というのがホンネです。認定を得られれば、仕方なく対応する・・・というのが当面のスタンスです。オペレータがrobo-oneに出たい!と言えば直ぐにでも対応するんですが、その気はなさそう(^^;) 結果は、吉田ファミリア最高位の3位でした。オペレータもバトル慣れしてきたのか、まずまずのオペレートだったようです。後は勝てるモーションを仕込んであげれば完璧かな? ・・・このへんはメカニックの責任です。 |
2009.2.1 第4回ドレミファそうかコンサート 出演
| 音楽会では、崖の上のポニョのダンスを踊ってきました。 ほとんど格闘家なさくら2号ですが、なるべく可愛っぽくモーションを作ってみましたが武道の様(笑) 曲に合わせるのも結構大変でしたが面白かったです。 |
 |
2009.1.11 わんだほー6 5位
| メインオペレータ初参加のわんだほー6でした。モーションは前回のもので完成していると判断し微修正するだけで挑みます。しかし・・・ ダッシュ:少し走行速度を落として安定に振ってみました。上手く回れて7-8秒、失敗しても10秒程度を狙ったものの、ゴール手前30cmでオペレータがパニくってしまって22秒(^^;) ボトルトラクション:前回同様18本押せるモーションで12本に挑みます。少し滑ったのか完走ならずの186cmでしたが、まあこんなもの。 サイコロ:実は前日のコソ練でrsv3で勝てなかったモーションです。なんと16点を記録! オペレータも上手でした。 キューブ:とにかく落っこちないように気遣って、なんとか勝利得点を加えます。 ランブル:たぶんオペレータは、ランブル初参加です。自滅して終了・・・ まあ、そんなもんでしょう(笑) というわけで、ダッシュで脱落したものの、サイコロで稼げたのか5位(ちなみに5位は2度目)という、まずまずの結果でした。バトルの準備を全くしていなかったので、予選落ちで良かったかも(笑) まあ、本領発揮できるのはバトルではありますが(^^;) 賞品で、買おうと思っていたRE00Vを頂いたり。カミさんが欲しがっていた酒を頂いたり、でも、オペレータが欲しかった「ねじろぼ」と交換して頂いたり(平野さん、ありがとうございました)、と良いものを頂きました。 残りスケジュールから考えると、さくら2号の今期のrobo-one参加は難しそうかな・・・ 最後に、オフィシャルな皆様、参加者の皆様、対戦していただいた皆様、ありがとうございました。 |
2008.12.30 KONDO CUP#13 OPEN CLASS 優勝
| さくら2号、初めてのサッカーでした。結果は運よく優勝ですが、3戦中2失点とキーパー的には負けです(^^;) rsv3のモーションの真似をしてみましたが体格差による無理があるようです。体格に合ったモーションを開発しないとならないみたい・・・ ちなみに、次のKONDO CUPは2/14だそうです。次も出るなら、さくら2号で参戦予定です。 |
2008.11.3 草加ロボットフェスティバル ロボットタッグバトルトーナメント 優勝
| rsv3と同じリーチにしていた手の延長板を外し、代わりに、腕の長さを#14仕様に調整しました。それ以外はナガレンジャーの時と何も変わっていません。機体規格は重心を除いて#14仕様です。(#15に出場できるように画策中・・・) ロボットプロレスに向けての最大の目標は、大型機でも投げられるように(つもりで)仕込んでみました。初戦から、優勝候補の大型機アリモプレナ&アリキオン、アリモプレナには四肢が短く上手く届きません(^^;) 精進あるのみ! 2戦目も強豪、優勝候補のクロムキッド&ガルー、主オペレータも慣れてきたのか豪腕ガルー相手に大健闘! なんとかドローに持ち込みます。最後は拍手判定ということで、辛くもコマを進めます。決勝は、不知火&サアガの最強軍団、背が低いサアガに効力の無い投げ技を連発してました(^^;) まだまだ練習不足かな・・・ 詳細 |
 |
2008.8.30 第4回ナガレンジャー・ファイティングフェスタ BSET4(同一3位)
| わんだほー仕様から、足裏をrobo-one13回仕様に改造しての参加です。オペレータは久々のメインオペレータでした。夏季休暇でバトルモーションを仕込み、わんだほーほど高速でないものの、rsv3より速い歩行で機体は絶好調。今日は、メインオペレータが冴えていたのか、絶妙な攻撃タイミングで準決勝までコマを運んだものの、デカ・クロムキッドに敗退。大型機向けの攻撃モーションは作ってないんですよね〜 とはいえ、よく頑張りました! 当面は、robo-one#14に向けてrsv3の練習相手用に強化する予定。 |
 |
2008.7.20 わんだほー5 11位
メインオペレータが所用で行けないのでメカニックの代行でした。ボトルトラクション向けのへんな足構造にしたおかげで、調整が間に合わずバトルモーション無しでの参加でした。予選最高順位を目指します!
ダッシュ:相手がサアガということで高リスクな高速歩行を仕込んでいったものの操作ミスで玉砕、それでも10点もらえた模様。 ボトル:12-3本で調整、18本まで押せることを確認していたので余裕・・・だったのだが、セッティングミスで全く押せませんでした(^^;) 以降、ぐだぐだモードに突入・・・ サイコロ:脱1点 初勝利です(笑) ちなみに、1〜5回共全てGP組みが相手、なんという縁・・・ キューブ:チームメイトの皆様、申し訳ない、全ては私のせいです・・・ ランブル:バトルモーションが無かったので辞退しました、予定通り。 スタッフのみなさま、参加者のみなさま、楽しい時間をありがとうございました。 |
 |
2008.5.6 RT主催 バトルカップ 決勝 初戦敗退
残念ながら初戦敗退でした。機体の方は、おおむね完成なので、あとは練習あるのみかな? 当分大会参加予定はありませんが、オペレータ&機体が勝てるレベルになったら、どこかの大会に参加します〜 何時の日か???
2008.4.28 KONDO主催バトル大会 BEST 8 (2戦目敗退)
この大会を目標に設計してきました。バトルカップから腕延長(120%仕様)、腕の回転軸を付けられたものの掌までは間に合いませんでした。ぎりぎりまで改造していたおかげで、最大の問題であるオペレータ養成は全くできず(^^;) ほぼ実戦のみでバトル演習している感じです。
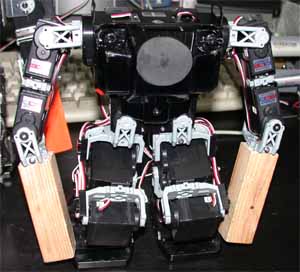
| 寸法・重量 | 高さ:35cm 重さ:2.35Kg |
| サーボモータ | KRS-4013HV x12 KRS-4014 x1 KRS-2350HV x6 |
| 軸数 | 足 x10 腕 x8 腰ヨー軸 x1 |
| コントローラ | RCB3J改 (RCB3HV相当) |
| ジャイロセンサ | KRG-3 x1 (pich軸のみ) |
| 加速度センサ | KXM52-1050 |
| その他のセンサ | なし |
| ラジコン | KRC-1 |
| 電源 | リポ電池 Hyperion Lite Storm 3S 800mA |
2008.4.20 RT主催 バトルカップ 予選Cグループ 2位
| デビュー戦はバトルカップになりました。メインオペレータは子供が担当することとなり、操作を教えながらの試合になりました(^^;) 結果は、デビュー戦には上々の2位です。とりあえず、5/6の決勝にコマを進めることができました。 バトル仕様とするには17軸では辛いです、腕の回転軸を付けて19軸に落ち着きそうです。後は腕と手の改造をしたいけど、時間があるかな? |
 |
設計仕様
| 寸法・重量 | 高さ:33cm(予定) 重さ:2Kg(予定) |
| サーボモータ | KRS-4013HV x10 KRS-4014 x1 KRS-2350HV x6 |
| 軸数 | 足 x10 腕 x6 腰ヨー軸 x1 |
| コントローラ | RCB3J改 (RCB3HV相当) |
| ジャイロセンサ | KRG-2改 (KRG-3相当) x2 |
| 加速度センサ | KXM52-1050 |
| その他のセンサ | なし |
| ラジコン | KRC-1 |
| 電源 | リポ電池 Hyperion Lite Storm 3S 800mA |
「小さくて可愛いっぽいけど強い!」が設計コンセプトです。攻撃力より防御力、パワーよりスピードを求めています。KONDO-CUPとROBO-ONE#13規定で製作したため、直近のROBO-ONEの重心規定が合わず参加できませんが、参加可能な大会には極力参加します。






 写真の通り、サーボのブラケットの取り付け向きを反対にするだけです。KHR2の手が付いていたサーボアームの根元を使って2つのブラケットを繋ぎます。ネジには2mmφ
L=10mmを4本(片側)とナットを使います。取り付けは右の写真の通りです。
写真の通り、サーボのブラケットの取り付け向きを反対にするだけです。KHR2の手が付いていたサーボアームの根元を使って2つのブラケットを繋ぎます。ネジには2mmφ
L=10mmを4本(片側)とナットを使います。取り付けは右の写真の通りです。





 ました(笑) ちなみに泊まった個室はB寝台のソロという、一番安くて狭い部屋で1Fでした。
ました(笑) ちなみに泊まった個室はB寝台のソロという、一番安くて狭い部屋で1Fでした。 ん・・・
ん・・・
 robo-one#12の行きもサンライズ瀬戸を利用しました。ソロより1つ上のシングルはかなり広くて快適です。パソコンを乗せられるテーブルもあります。ロボットはマットレスを剥がせば1m
x 1mほど確保できます(段差あり)。ただ、室内が静かなので、激しい音がする調整は気を使います(^^;) アルインコ(電源)は無理そうだったので、リポを大量に持ち込んで資格審査用モーションの作成をしてみましたが、問題なく行うことができました。
robo-one#12の行きもサンライズ瀬戸を利用しました。ソロより1つ上のシングルはかなり広くて快適です。パソコンを乗せられるテーブルもあります。ロボットはマットレスを剥がせば1m
x 1mほど確保できます(段差あり)。ただ、室内が静かなので、激しい音がする調整は気を使います(^^;) アルインコ(電源)は無理そうだったので、リポを大量に持ち込んで資格審査用モーションの作成をしてみましたが、問題なく行うことができました。



{kind=link}