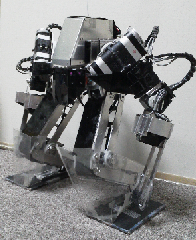
| 元・主力戦闘機 「ガーゴイル ミニ」 S/N:rsv3-rev.2 ID=740 【引退】 |
足裏サイズ規制レギュレーションによって、ミドルサイズのガーゴイル・ミニは引退しました。
2012.3.25 robo-one#20 2位
仕事が忙しくて、リベンジ(大型機)をいじってる時間がなくミニを選択。必然的にかけっこよりバトルメイン!
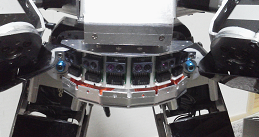
ガーゴイル・ミニの下半身に、ガーゴイル・リベンジの上半身にレギュレーションに合わせて掴める手をつけました。究極の軽量化のおかげか、掴める手が付いたにもかかわらず100g超の軽量化に成功し、バッテリ容量の倍増化、足首プロテクタの装着が可能になりました。
予選:認定権を持っていましたが完走したかったので、バトル用の遅い歩行で完走しました。ちなみに「速いモード」もあって60cm/秒ほど、予選リベンジで披露しましたが、ゴール直前で操作ミスで落ちていましたので、やっぱ遅い歩行で正解w
本戦:今回は集中力が持続して決勝まで行くことができました。しかし、決勝でサーボが破損、一気に集中力が切れて・・・ 玉砕。セコンドの有無が結構大事なのかなと思ったり・・・ |
|
2012.3.3 第10回KONDO BATTLE(OPEN-CLASS) 優勝 robo-one#20
認定権取得
2011.9.23 第8回KONDO BATTLE(エキシビジョン) 準優勝
2011.4.10 ROBOT JAPAN 1st 2回戦敗退
2011.3.20 robo-one#19 開催中止
2011.2.26 ナガレンジャーFF 2位 robo-one#19 認定権取得
2011.1.10 ROBOT JAPAN ZERO 2回戦敗退
2010.5.16 ロボットフェスティバル2010 2位
各種バトル大会(ロボフェスに限らず)の規定が変わってガーゴイルが出られなくなる前に、あちこちの大会に出よう・・・ ということで参加しました。
俊敏な小型機に翻弄されつつも決勝まで進出。しかし、決勝開始間際、ゲストのトークで盛り上がっているところに、配線トラブルで棄権という失態を・・・
(オフィシャルな方々、観客の方々、申し訳ありませんでした)
|
|
2010.3.21 robo-one#17 初戦敗退
気乗りのしないオペレータ(さくさく)を説き伏せて無理やり出場しましたが初戦敗退してしまいました。
無理やり出したことに、かなり後悔しています、たぶん、さくさく最後のrobo-oneでしょう。自主的に出たいと言ってくれれば別ですけどね・・・
スタッフの皆様、参加者の皆様、お疲れ様でした&ありがとうございました。 |
|
2010.3.13 第4回 KONDO BATTLE 総合優勝
関東最後に認定権試合でした。ひょんなことでメカニックがオペレート、なんと、強豪キャバリアがマシントラブルでリタイアし、OPNEクラスを征することができました。学生クラス、エキシビジョンクラスの優勝者と三つ巴のランブルでも運よく勝利し総合優勝を頂きました。
良く考えると、学生クラス、OPENクラス共に去年と同じ優勝者なのですね(笑)
スタッフの皆様、参加者の皆様、お疲れ様でした&ありがとうございました。
認定を取ってしまうと家庭内争議(笑)も決着し、本戦は正オペレータの「さくさく」が参加が決定しました。 |
|
2010.2.20 ROBO-ONE 軽量級認定大会 in HHP
2nd 2位
新生ガーゴイル・ミニの初陣でした。名前と見た目は「ガーゴイル・ミニ」ですが、中身は完全に新作です。
オペレータは「チームさくさく」、前日夜7時に機体が完成して、モーションをつっこみ(ガーゴイルのモーションそのままで歩けたのでらっき〜、調整したのは起き上がりのみ)、それからオペレータの練習開始、rsv3を練習相手にして10分ほどの練習でrsv3が破損してしまい少し練習不足でした。とはいえ、難しいガーゴイルの操縦を短時間で覚えるのだから流石ゲーマーなのかも?
1戦目:ガーゴイル・ミニに負けない結構大型の機体です。なかなか倒せず、辛勝。
2戦目:機体の相性が良かったのか、なんとか勝てました。
3戦目:去年のガーゴイルの様な大型機、どちらも決め手を欠く試合展開で延長へ、運よく勝利を拾いました。
4戦目:オペレータの戦略的な問題点が露呈、私の誘導もまずかったのでしょう。延長延長の末、敗退。
というわけで、認定権を落としてしまいました。家庭内事情(笑)を含め「さくさく」のrobo-one参戦は難しいかな?
スタッフの皆様、参加者の皆様、お疲れ様でした&ありがとうございました。 |
|
|
|
|
| 中量級ガーゴイル 「ガーゴイル ミニ」 S/N:rsv5 【引退】 |
robo-one#16のためにrsv5をバトル向けに再デザインしたロボットです。大きくないのはガーゴイルじゃない! というわけで名前は「ガーゴイル ミニ」です。短腕レギュレーションにあわせて脚も短くしています。
3.8Kgと半端な重量で、robo-one#17に出られないため下記の記録を以って引退しました。以降は大型機(名称未定)として復帰します。しかし、「ガーゴイル・ミニ」の名称はバトル専用機として新機体に受け継がれました。
「ガーゴイル」が「ガーゴイル・ミニ」(rsv3名称含)になって参加した大会は、
2009.8.15 S.H.R.B (サンライズヒーローロボットバトル) 優勝
2009.8.15 第3回ロボワンゲート イン 郡山 2位
2009.8.16 第4回ロボワンゲート イン
郡山 優勝
2009.8.29 第6回ナガレンジャーファイティングフェスタ 優勝
2009.10.11 ロボファイト10 優勝
2009.11.21 いたばし産業見本市 ロボットコンテスト 優勝
目標だったrobo-one#16に出られなかったのが心残りですが、極めて優秀な成績でした。今度のrobo-oneは3kg以下級ということで、3.8kgのガーゴイルミニ(rsv5)はとても半端な重量になります。といって、このまま3kg以下級に軽量化は不可能なので、rsv5は大型機に戻す予定です。目標としては1m超(名称未定)を狙っていますが、有事には巨神兵「ガーゴイル」仕様に組み替えられるといいかな?
と、言うわけで、とりあえず「ガーゴイルミニ」は引退です。 |
2009.11.21 いたばし産業見本市 ロボットコンテスト 優勝
予選は狭いパイロン(?)の間をすり抜けるスラローム競技です。ガーゴイルには小さすぎて極めて難易度が高かったです。
自宅で適当に作ったコース(寸法が大分小さい)で歩行モーションの調整をしながら試走(壊れるので3回だけ)した結果、ミスりながら2周弱、2周強、3周回れたので、ノーミスで4周だろうを甘い見込みで練習終了(壊れるから)
現地で1度くらい練習できるかなと思っていたら、いきなりぶっつけ本番でした(^^;) 腹を括って歩行テストすらせずに挑みます(半ば諦め?)。
自分でコンセントレーションを思い切り上げて、いざ本番。結果は4周半と実力の150%を出せました。集中しすぎたせいかゴール直後にめまいを感じたほど、その後数時間、胃が痛くて困りました(^^;) 3日分のエネルギーを、この2分間で使い切った感じです(笑)
スラロームの結果は4位でしたが、今までのロボット大会で最高のデキでした。
本戦の方も運良く結果は優勝、最高の1日でした。
参加者の皆様、オフィシャルな皆様、楽しい時間をありがとうございました。 |

|
2009.10.11 ロボファイト10 優勝
久々のロボファイトでした。なんと結果は夢にまで見た優勝!
robo-one#16に出られなかった雪辱を晴らせました。
参加者の皆様、スタッフの皆様、お疲れ様でした&有難うございました。 |
| 寸法・重量 |
高さ:65cm
重さ:3.8Kg
脚長:40cm 腕長:35cm |
| サーボモーター |
KRS-4013HV x11
KRS-4014SHV x14
KRS-6003HV x3 |
| 軸数 |
足 x8 (平行リンク(rsv-link),Wサーボ)
腕 x8(Wサーボ) |
| コントローラ |
RCB3HV |
| ジャイロセンサ |
なし |
| 加速度センサ |
KXM52-1050 |
| その他 |
8ch→16ch Wサーボ回路 |
| ラジコン |
KRC-3(カメ) |
| 電源 |
リポ電池 WAY POINT 3S 1350mA |
|
 |
2009.9.26 robo-one#16 棄権
| 直前に自作ブラケットが割れました・・・(と、言うことにしておこう。真の理由は他にあるけど) |
 |
2009.8.29 第6回ナガレンジャーファイティングフェスタ 優勝
恒例のナガレンジャーFF、今回はメカニック1人で参加です。robo-one#16に向けて短腕のテストを兼ねての参加です。やっぱ、戦闘力が低い! 起き上がりも難(^^;) とはいえ、夢の長井初優勝が果たせました。
スタッフの皆様、参加者の皆様、お疲れ様でした&ありがとうございました
腕以外はGT4戦のrsv3とほぼ同様の構成(多少重くなった?)です。駄目なところが一杯みつかりましたので、これから修正にかかります。間に合うかな・・・?
| 寸法・重量 |
高さ:65cm
重さ:3.8Kg(実測)
脚長:40cm 腕長:35cm目標(w) |
| サーボモーター |
KRS-4013HV x14
KRS-4014SHV x14 |
| 軸数 |
足 x8 (平行リンク(rsv-link),Wサーボ)
腕 x8(Wサーボ) |
| コントローラ |
RCB3HV |
| ジャイロセンサ |
なし |
| 加速度センサ |
KXM52-1050 |
| その他 |
8ch→16ch Wサーボ回路 |
| ラジコン |
KRC-3(カメ) |
| 電源 |
リポ電池 WAY POINT 3S 1350mA |
|
|
|
開発コンセプト
妥協! 妥協に始まり、妥協に終わった機体ですw でも、うちの主力戦闘機! |