| うさぎ跳びができる機体を・・・ が、基本設計でした。サッカー向けにチューンを進め、更にはバトル向けのチューンも施されました。 特徴はカマキリの様な腕、特技は太鼓、サッカーのキーパーでは失点が極めて少ないのも自慢でした。 |
 |
2010.3.21 ROBO-ONE#17 2回戦敗退
| 背水の陣で望んだrsv3にとっての最後の戦いでしたが結局勝つことはできませんでした。 機体の限界ではなく、オペレータ(メカニック)の限界(操縦だけではなくマネージメント全般含)を思い知らされた戦いでもありました。 スタッフの皆様、参加者の皆様、お疲れ様でした&ありがとうございました。 rsv3-rev2は「ガーゴイル・ミニ」に統合、rsv3は非公式戦専用(レギュレーション外機)軽量機(多分2kg前後)として余生を過ごす予定です。 |
2010.2.6 第7回ナガレンジャーファイティングフェスタ 2位
| 新機体のテストのつもりだったのですが、作業が遅れていたのと、レギュレーションが変更(正確には公開)になったので完成していません(^^;) 仕方が無いので、旧rsv3(15回仕様)での参戦でした。前日の夜に音楽会仕様からバトルモーションを入れなおしての参加です。準備が適当なわりには2位と好成績でした。 スタッフの皆様、参加者の皆様、お疲れ様でした&ありがとうございました。 |
2010.1.24 第5回ドレミファそうかコンサート 出演
| 今回は、kinopyの木琴、青ミャノイのマラカス、白ミャノイの指揮、rsv3の太鼓とにぎやかでした。 大勢で音を合わせるのは大変ということが身にしみた一日でした(^^;) 休憩時間にロビーでやったデモンストレーションは大人気! 会場中の子供が狭いロビーに全員集まった感じです。プロの演奏家の方にロボットに合わせて演奏していただきました。傍目、普通のアンサンブルに聞こえますが、みんな演奏家のアドリブです。さすがプロ! 音あわせすらできない素人は唖然とするばかり(^^;) ともかく、楽しい1日でした。 |
2009.11.3 ロボットプロレス できんのか5
| ホンモノのrsv3が公的な場に出るのは前回の「できんのか3」以来です(^^;) ほんと久々・・・ 今回の仕事はkinoppyの木琴に合わせて手動(ラジコン)で太鼓を敲くことでした、木琴に合わせるのはかなり難易度が高かったです。太鼓を連打するとラジコンの応答性が悪くなるし、太鼓の音で木琴の音が聞こえにくくなるし、それゆえに調子が外れると目立つし(^^;) と、いうわけで2公演を無事?消化しました。 |
2009.8.15 S.H.R.B (サンライズヒーローロボットバトル) 優勝
2009.8.15 第3回ロボワンゲート イン 郡山 2位
2009.8.16 第4回ロボワンゲート イン 郡山 優勝 (robo-one#17認定権取得)
| 兼ねてから改造計画のあったrsv3ですが、家庭内事情で郡山には1人で参加することになり機体を2台用意する必要がなくなったので、手っ取り早くrsv3の改造評価を行うべくrsv5をベースに改造してたのが今回の機体です。更には、SHRBの方が楽しそうに思えたので、こちらにも参加すべくGM(ジム)のハリボテ外装を製作しました(^^;) なんでGMなの? の理由は、GM=やられ役=イチバンになれない=rsv3 という思いから、GMで勝つ!がテーマでした。
家族が操縦している場合は家族に一任します、欲しがっているのに要らないとかいうと泣き出すから(笑) |

2009.5.5 ロボットプロレス できんのか3
| 連休締めくくりのイベントはロボットプロレス「できんのか3」です。
プロレスっぽくタッチワークのモーションが必要とのことで作ろうと思っていたものの、徹夜続きでへたっていたので早々に寝てしまい作れずじまい、結局、会場到着後に作ることになりました。お陰で前半の試合を見ることができませんでした、残念・・・ 今日の出番はタッグマッチのチャンピオンベルトの防衛戦、悪の組織(笑)との対決です。rsv3のオペレータは昨日と同じ「チームさくさく」でいくことになり、「さくら2号」をメカニックが担当しました。まめにタッチワークするように指示が出ていたので、タッチのためにコーナーへ移動中に2ダウン取られてしまったため、まめなタッチワークは挫折、そのまま戦闘継続です(^^;) 難しいですね~ 折角作ったタッチワークのモーションも慣れないせいか結構難しい、反対に手を出してしまうこともしばしば(笑) 「チームさくさく」には教えたんですけど、結局1度もやらなかったみたいです(^^;) まあ、練習なしですもんね・・・ 後半、4台入り乱れての混戦で、何かわからないうちに勝ってしまったようです。ベルト防衛に成功しました! 今回は、買い物とかでロボスポへ行くと、必ず誰かが打ち合わせをしている様でした、なかなか準備周到、成功はそのおかげですね~ まずは、皆様、お疲れ様でした。 |
 |
2009.5.4 ROBO-ONE#15 3位
| 3位入賞の快挙! 今日のrsv3のオペレータは「チームさくさく」、ゲーマーな小学5年生です、何時も1~2回戦で負けてしまう不甲斐ないメカニック(昔はゲーマーだったんだけどね)の代行として出場しました。メカニックの口癖である「ロボットは強いけど人間がダメだから~」が真実なのか検証されます。 ちなみに、ロボットの方は前回のrobo-oneと変わるところはありません、記録によると脚のサーボが4014になってますがモーションは変更していませんし、動きに違いはありません。あとは得意の(廻し)投げのモーションを微調整してあります。 ホンネを言うと余り期待していませんでした、というかガーゴイルで手一杯で何も考えていませんでした(^^;) ただし、14回に参加した時はマジで優勝を狙ってましたが(笑) マジ・・・ 1戦目はROBOSPOT仲間の「ディミナス」です。強烈な投げを持っていますが幸いなことに1戦目は打撃技オンリーです。でも、rsv3も横パンチはイマイチなんですよね(^^;) それに、機体に慣れてなかったのか、舞い上がっていたのか? 辛くも1勝目を得ました。 2戦目はGP組の「アリモプレナ」です。軽量級でも大きな機体で、きっと打撃技では倒せなかったでしょう、幸いなことに投げ技オンリーということで助かりました。大きくて上手く投げられずに逆立ちする場面も(笑) たしか、前回のロボットプロレスでも同様の場面が見られました。オペレータに言わせると、これから後が長かった・・・ とのことで、苦戦の末勝利しました。(オペレータからこのような意見を聞かされるのは、成長を感じられて一寸嬉しかった) 3戦目は絶対王者の「キングカイザー」、このときrsv3は膝サーボがギア割れで回らないという致命的な状況に陥っていました。半ば試合を諦めつつリングに上がります。いざ、通電してみるとなんとか歩ける模様、いけるところまで行こうということで試合開始です。カイザーには廻し投げが有効だったようで、なんとか辛勝しました。膝サーボはというと、片側はギア欠け、もう片側はケースが割れてギアがぐちゃぐちゃになっていました。こんな状態でも動いてくれたrsv3に感謝します。 準決勝は日本の強者を破ってきた「Bi-Ma」です、今日はガーゴイルと2台体制での参加だったので全く他の試合を見ることが出来ず全く情報がありません。試合開始直後、rsv3の様子が変です。どうやら無線が不調な模様です。そうこうしている間に1ダウン先取されてしまいました。ダウン復帰後、再び無線トラブル、そのまま直進して止まりません、ここで更にダウンを奪われます。この状況にオペレータが動揺したのか動きが悪い! フォローして少し落ち着くものの、得意の廻し投げを絶妙なタイミングで防御されてしまい決まりませんでした。結局負けてしまいました。 3位決定戦は「Stormwaves Light」です。前の試合の動揺と敗戦のためかオペレータが、ふさぎこんでしまい本来の動きができなくなってしまったようです。どうやら相手のマシンもマシントラブルで本調子ではなかったようす。どちらも本調子ではなかったようですが、なんとか勝利し3位を頂きました。また、ふさぎこんでしまったオペレータを慰めていただきありがとうございました。 ・・・と、いうことで結果を残せたrsv3、へたくそなのが判明したメカニック(笑) 試合を見ていると、まだまだオペレータの不慣れな面が見え隠れしますけど、気を良くしてちょっとは練習してくれるかな? |
 |
2009.5.3 第2回KONDO-BATTLE 棄権
| 会場に到着後早々にrsv3をセットアップ、「チームさくさく」はrsv3をオペレートしたことがないので機体に慣れさせるための大会参加でした。しかし、rsv3の腕のサーボの配線が接触不良のようで動きません(^^;)
配線交換は奥まったところにあるCPUボードを引っ張り出さねばならない手間のかかる作業ですが、出番まで10分程度の余裕があったので、急遽修理となりました。 さて、痛んだ配線を交換し電源投入! なんと、動かなかったのは逆の腕でした! 痛んで無くても配線不良はありますものね、十分に確認しなかったメカニックの失敗です。この時点で、出番まで、あと2分程度、流石に作業不可能と判断し棄権となりました。 |
2009.2.22 NHK WORLD TV 出演
| NHK国際放送 2/3の NEWS LINE のロボット特集にメカニックが出演しました。ロボスポでのロケがメインで何時ものロボット、何時ものメンバーも映っています。あと、自宅でメカニックが何やら作業しているのが映ります。しかーし、全部英語ですよん! なんでも視聴者は3億人だそうな!! |
2009.2.7 第5回ナガレンジャー・ファイティングフェスタ best8 認定権取得
オペレータは不慣れな「さくママ」に変更、なんと認定権取得!
best8で認定権を得られた経緯: best8になったのは、キャバリア、クロムキッド、ナガレブラック、さくら2号、メタちゃん、ガルー、rsv3、山形枠1機(名前を忘れてしまいましたスミマセン)、ここから、GP組、既認定者、辞退者(さくら2号)を除くと、rsv3と山形枠しか残りません。山形は優先枠があるのでrsv3に回ってきたものと思われます。新機体rsv5は未知数なので認定権取得以前に、完成するかどうかも分からないので、吉田ファミリアとしては出場枠が1つ欲しかったのがホンネです。ということで、認定を、貰えるなら貰うというのが今回出場のスタンスではありました。 robo-oneから変わったことといえば、脚のサーボが全部4014になったこと。何か変化があるかな? と思ったけど、歩行に関しては何も変わりません(^^;) 歩行速度も落ちていないので、最適化されれば結局同じということのようです。まあ、ジャンプが苦手になっただろうし、キックもダメになったとは思いますが(^^;) というわけで、サッカーは「さくら2号」に任せます。 |
2009.2.1 第4回ドレミファそうかコンサート 出演
| 1200人収容という大きなホールで太鼓を演奏してきました。音楽演奏用のホールということもあって、直前の練習では音響なしでも聞こえていましたが、より迫力をということでPA付きになりました。結構低音が出ていていい感じでした。 詳細 |
 |
11/20 NHK BS2 熱中夜話 夢のロボット・ナイト出演
| 2夜目の夢のロボットナイト編に出演しました。演目はrsv3デビューの時にrobo-oneの予選でやった太鼓叩き、「ロボット男祭り」というタイトルを戴きました。深谷のイベントでも叩きましたが、NHKは音響が凄い!さすがです、実に良い音で収録されていました。 |  |
11/3 草加ロボットフェスティバル ロボットタッグバトルトーナメント 優勝
| robo-one#14で不発だった廻し掛け(投げ)モーションは小型な「さくら2号」を実験台にしていたので、これを標準機でも効く様に微修正してて臨みます。今回は上手くツボにはまって大成功でした。 詳細 |
 |
10/12 robo-one#13 (予選:認定免除 決勝:軽量級 初戦敗退)
|
 |
9/21 第12回 KONDO-CUP open-class 優勝
robo-one#14の重心規定対応改造に追われ、準備に着手できたのは前日の昼過ぎ。robo-oneサッカー#2のモーションを今の機体に合わせて微修正することでお茶を濁しましたが、大きなフィールドで動かせる機会が無く、当日試合開始直前までフィールドに居座って修正しました(^^;) ちゃんと動くのはキーパーモーションのみ、あとは、それなりです(笑)
初戦から強敵サアガ軍団とあたり、オウンゴール2点(トリニティ)を含む4-2という大味な試合展開から始まり、決勝のサアガ軍団とは延長2回まで双方無得点、嫌いなPK戦となりました。相変わらずPK戦は想定外だったので、ほぼ諦め状態で挑みます(^^;)
運よく3人セーブしたあとキックの順番が回ってくるも、関連モーションをフィールドで試すのは、ほぼ初めて状態(笑) robo-oneサッカー#1(1年以上前!)の頃に作ったちょこちょこ歩きモーションを入れておいたので、それを使ってアプローチするも、機体の軸構成や重心位置が違うのでまともに動きません(^^;) 後退させると少し前進してから後退をはじめるとか、横歩きをすると転回をはじめるとか、どっちに動くか運次第(笑) こんな状況で運よくアプローチできたので1発狙いのリスクの高いフルモーションのキックを発動、うまくキックできてゴールポストぎりぎりのシュートが決まりPK戦を征することができました!
ほとんど、運が良かっただけの気もしますが、前々回のカイザー戦でのPK戦敗退以来のしこりが少し取れたようで嬉しかったです! 早く、PK戦対策を立てねば(毎回言ってるような)・・・ 今度のKONDO-CUPは12月だそうです。
ワケアリで宴会参加ができなかったのが残念。参加者の皆様、オフィシャルな皆様、ありがとうございました。
8/30 第4回ナガレンジャー・ファイティングフェスタ BSET4(同一3位)
家族で3機の参加だったとか、前日まで長期出張だったとか、かな~りハードな日程だったので、rsv3は京都以来、電源SWを入れることもなく、ネジの緩みを確認することもなく参加しました(笑) 結果は、さくら2号共に準決勝まで進み、いずれも大型機体に敗れて BEST4、3位決定戦が無くて同一3位でした。オフィシャルな皆様、参加者の皆様、楽しい時間をありがとうございました。
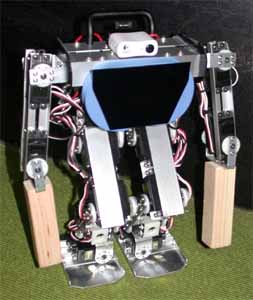
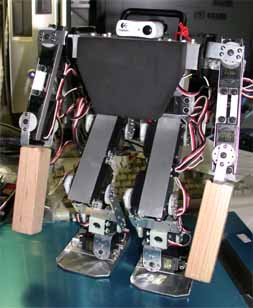
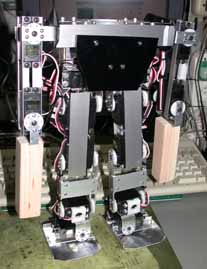
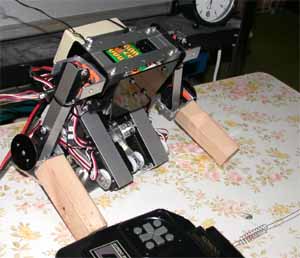
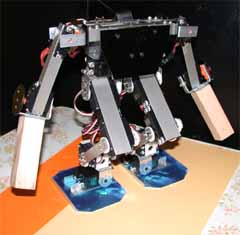
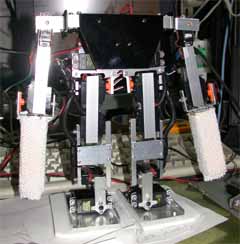
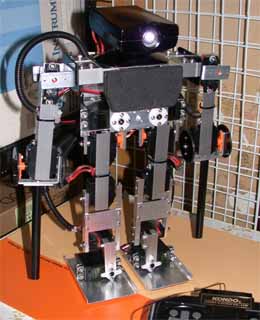
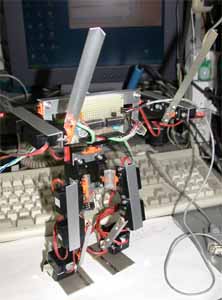
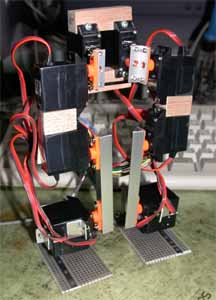
| 寸法・重量 | 高さ:42cm 重さ:2.9Kg |
| サーボモーター | KRS-4013HV x14 KRS-4014SHV x9 |
| 軸数 | 足 x14 (ヨー軸あり) 腕 x8 腰ヨー軸 x1 |
| コントローラ | RCB3HV |
| ジャイロセンサ | KRG-3 x2 |
| 加速度センサ | KXM52-1050 |
| その他のセンサ | なし |
| ラジコン | KRC-3(カメ) |
| 電源 | リポ電池 WAY POINT 3S 1350mA |
8/17 ロボプロ競技会 in私のしごと館 Vol.4 1日目:1位 2日目:2位 総合:2位 (第14回ROBO-ONE決勝戦出場権取得)
前回認定権を得た京都に再び行ってきました。奇しくも、前回と同様のシチュエーション、両日で1位と2位、総合2位、認定権を譲り受けて取得することとなりました。(前回はクロムキッド、今回はレグホーン) NAKAYANさん、ありがとうございました。(明日から出張なので、取り急ぎ)
8/10 深谷サングリーン キッズロボットフェスタ バトル (ロボプロ主催イベント)
| メタリックファイター、タマ、トコトコ丸、クロムキッド、ガルー、スーパーディガー、automo
03、rsv3 が深谷に集結して行われたバトル大会でした。ショーイベントと言う事もあり、デモンストレーションも大事、ということで、11回大会でウケの良かった「太鼓」をたたいてみました。今回も評判が良かったです、前日、半徹でバトルモーションには目もくれず、太鼓の台を作ったかいがありました(笑) 定番デモンストレーションにしようかな~ 結果は2日間共に、1位:ガルー、2位:スーパーディガー、3位:rsv3でした。とても楽しい2日間でした、参加者の皆さん。オフィシャルな皆さん、ありがとうございました。 |
7/6 第二回ROBO-ONE SOCCER 3位
第二回ROBO-ONE SOCCER仕様
|
 |
6/8 第11回KONDO CUP in アニバーサリ4 OPEN-CLASS 優勝
rsv3は、かれこれ10ヶ月、ずっとキーパー専用機でした。守りのモーションの完成度は高かったのですが、攻めのモーションは退化していき、足は遅く、キックは不安定なまま、投げも手付かずのままでした。今回は、フォワードに回らなくてはならない可能性があったので、攻めのモーションも仕込んでの参戦です。結果としては、練習不足というか、実戦に則した動きになりきってなかったというか、広くなったフィールの先のほうが良く見えないというか、課題は山積ですが、実戦で感を戻すきっかけくらいにはなったかな?
結果は運よく優勝となりましたが、実のところ、準優勝のバンブーブリッジから1点も取れませんでした。機動力が加わるというrobo-oneサッカーでは、相当な強敵になりそうです。
4/28 KONDO主催バトル大会 2回戦敗退
さくら2号にかかりきりで、rsv3は余り構っていませんでした(^^;) プチ改造で前日に腕延長と足裏サイズ拡大を試してみたけど、足裏拡大は横歩きが遅くなるのでNG、替わりに錘を載せてみたら、自宅ではいい感じ。そのままモーション変更もせずに実戦投入したところ、リングの上では歩行が変(^^;) おまけに股関節サーボが過負荷(?)のためか異常動作をしてNG。予想通り、あまり良いところを見せることなく敗退してしまいました。
4/27 第10回KONDO CUP in お台場学園 OPEN-CLASS 準決勝PK戦敗退
サッカーは久々、CPUからモーションが消えていたので、キーパー歩行モーションは作り直し。おかげで以前より安定した良い動きでした。しかし、キックを含めたフォワード向けのモーションは適当です(^^;)
予選、ぶっちぎりの3連勝で決勝トーナメントに進むも、準決勝で急遽試合時間が5分に短縮で決着つかず、想定外のPK戦となりました(そういえば、当初のKONDO-CUPはPK戦もあったんですよね)。今後もPK戦をやるなら何か対策を考えておかないといけませんね・・・
2008.3.23 ROBO-ONE#13 (予選:認定免除 決勝:軽量級best8 2回戦敗退)
初めての認定出場
| 出張の合間の参加となりました。しごと館から予選前日の夜まで在宅したのは僅か2日間というスケジュールだったので、予選免除でなければ参加は不可能だったでしょう・・・ そういう意味ではラッキーでしたが、決勝では舞い上がっていたのか上手く操作ができませんでした。精進あるのみ! 仕様的には足裏を含め12回大会のまんまです。変更したのは、CPUボードとバッテリーの取り付け位置(つまり配線は全部引きなおし)、上半身に装甲版をつけて外装としました。 モーション的にも、バックを少し修正した以外は、脚上げ歩行にしたくらいです。名古屋の大会以降、スロープの完走率は100%だったので、これも全く調整していません。 rsv3的スロープ攻略法 1.まず速く走ること、遅いと曲がります。多少のボロ(接地)も影響が軽減されます。 2.足先を上げること、ころぶのは足先がひっかかるからです。 3.静止するのはスロープを降りてから、下りから暫くは前重心です、これが解消するまで止まりません。 4.rsv3の場合は、ジャイロはOFF。足裏は滑り足が有利。 |
 infixのサイン色紙を貰って喜ぶrsv3 |
2008.3.2 ロボプロ競技会 in私のしごと館 Vol.3 総合戦2位(1日目:準優勝 2日目:優勝) (第13回ROBO-ONE決勝戦出場権取得)
| RGC以来、3ヶ月ぶりのバトル大会でした。わんだほー4同様に気分的にはゆるゆる、ただし、準備はそれなりにしたのが効したか、1日目:準優勝(クロムキッド) 2日目:優勝 総合戦:敗退(クロムキッド) という結果となりました。東西の有数の強豪相手に1~2位を得られ予想外の好成績でした。 クロムキッドは認定権を行使しないということで、rsv3が譲り受けました。 仕事多忙ですが、予選免除のおかげで、robo-one#13には出られそうです。 |
 |
2008.1.13 わんだほー4 予選7位、ランブル優勝
| robo-one#13の参加の可能性が薄かったので、あまり気合が入らず、ゆるゆるな参加のつもりでしたが、作ったモーションの完成度は今まで出一番充実していたかもしれません(^^;) しかし、ダッシュは結果的にミスというか勘違いだったし(とはいえちゃんと走れても8秒程度)、ボトルは1本間違えたし(笑)、サイコロはジンクスを超えられませんでした(連携技は練習しないと使えないですね)。 が、ランブルは運よく優勝でjs-roboticsの8軸ロボットを戴きました。(早速作ってみたけどソフトがムズイ、まだ動かせません) あ、順位は7位で気合が入ってた前回と大差なしでした(笑) 次回は認定無しということで、また、ゆるゆるで参加します。 さて、しばらくロボット大会参加は冬眠期に入ります |
 |
2007.12.8 KONDO-CUP#8 OPEN-CLASS
今回はキャバリアが他大会へ出場するため、2機の助っ人を得、チーム編成を変えての出場です。クロムキッド、ガルー、ナアガ、rsv3(補欠)の4機で参加でした。何故か6チームしかエントリーが無く、リーグ戦+トーナメント戦という試合形式でした。結果は優勝! 通算4勝目、KONDO-CUP OPENクラス初の3連覇となりました。
2007.12.1 ROBO-ONE グランドチャンピオンシップ IN 国際 ロボット展2007
万全の準備を・・・と、前日休暇まで申請して望んだ試合でしたが、結局先週以来仕事繁多で何もできず。ただ、前日休暇のおかげで最低限の仕込はでき、ベターな状態での参加です。結果は予定通り(^^;)の2回戦でクロムキッドに敗退。試合運びに僅かな光明が見えた気がした戦いでした。
2007.11.25 ロボットバトル at 名古屋モーターショー
ロボファイトから連戦です。宿泊先でモーションを仕上げての参加でした。結果は、2回戦で、またもやキングカイザーに敗退。さすがにカイザーの壁は厚かったです・・・
2007.11.23 ロボファイト6 ORC部門
前日まで出張でロクに準備ができないままの参加でした。結果はbest8、3回戦で、またもやKZRに敗退。ロボットフォースの動画を見るとスリップしまくって自滅してました(^^;)
2007.11.3 第1回草加ロボットフェスティバル
和気藹々とした雰囲気のなかでのイベントでした。プロレス風に4本のロープを張られたリングが新鮮でした。トーナメントもプロレス風のタッグマッチで行われました。トーナメントは4チーム(8台)で行われ、決勝まで進むも惜しくも敗退しました。
| 2007.10.21 秋葉ロボット運動会2007 仕様 (サッカー:優勝 バトル:4位) まず1勝!
今回はバトル慣れしたツワモノが沢山出場されています。そこで、今回の目標はツワモノ相手に1勝でもあげること! そして、手が付いて久しいですが、実は手を積極的に使ったモーションはデモ以外ありません。サッカーでもバトルでも、手を使ったモーションを仕込むことが大会までの、もう1つの目標です。 2007.10.20 KONDO CUP#7 OPEN-CLASS 優勝 KONDO-CUP初めての連覇です。これで通算3勝目となりました。午前中、前日の調整が裏目にでたのか歩行不安定でしたが、必死に修正して昼過ぎには完調、強敵Aチームにゴールを攻め立てられましたが何とか凌ぐ事ができました。たた、無失点記録は自分の投げモーションのミスでオウンゴールして消えました(^^;) 2007.10.21 第2回 ツクモ CUP ロボット・バトル大会 4位 予選の徒競走は事実上のボーダーラインが8秒台(12秒台だった1台を除き全部8秒台以下)というハイレベルな戦いでした。自分はというと、5.37秒で8位でした。来年は6秒台でないと予選通過できないかも? 本戦の相手は全部GP組という豪華カードでしたが2勝2敗の4位という予想外の好成績でした! 強い相手とバトルができて楽しかったです。 スタッフの皆様、対戦していただいた皆様、楽しい時間をありがとうございました。 |
| 2007.9.23 ロボットフェスティバル2007 バトル:準優勝、バトルフラッグ:優勝 robo-oneの(精神的&肉体的)余韻が未だ残る中の大会でした。とりあえず、モーション修正、壊れたサーボを交換、電気系の補修、足裏の補修、RCB3のアナログポートを破損(^^;)、をこなしてはあるけど、イマイチ(精神的&肉体的)ピリッとしない状況でした。 デモはrobo-one予選で行ったキャッチボールを実行、センサがないのでキャッチが上手くいきませんでした(^^;) バトルはゆれる&狭いリングでイマイチ動きにくかったです。特に転んでしまう後退を修正に手間取りました。今回も無線トラブルが続出で、座れない(防御姿勢)、立てない、起き上がりが起動しない、など複数ボタンを押さねばならないモーションの起動が渋かったです。原因は、送信機のバッテリにあったようで、今後の改善につながりそうです。(座ったまま、立てなくなったケースが何度かありました、お相手していただいた方々、済みませんでした) バトルフラッグは、1戦目開始直後に、なんと股関節の直行軸ブラケットを破断! 分厚いブラケットが真っ二つです。1戦目は、ほとんど動くことすらままなりませんでしたが、クロムキッドの活躍で辛くも勝利。待ち時間の間に応急処置にインシュロックで固定してみました。いやあ、やってみるものですね! 突然変な向きに曲がってしまいますが動けるようになり、2戦目からは参戦できました。ただ、動き出しの時に、どっちに向くか不安定で動きを大きく制限されていました。 スタッフの皆様、参加者の皆様、楽しい時間をありがとうございました。 |
 手の込んだ盾を2つも頂き上機嫌のrsv3  ブラケット(SC-4000ARM-L)が真っ二つになり歩行不能に! インシュロックでサーボをフレーム吊り上げてみたところ辛うじて動けるようになりました。 |
| 2007.9.17 robo-one#12仕様 (予選8位、決勝
重量級best8) 予選突破!
2007.9.17 参加してきました。結果はなんと予選8位! 本戦はbest16(2回戦負)でした。予選は前回の反省から1分30秒程度の内容に縮めたのが良かったようです。8位という好成績は予想もしていなかったので、非常にうれしいです!! 本戦も2回戦でキングカイザーに敗退したものの色々収穫のあった戦いでした。 スタッフの皆様、参加者の皆様、どうもありがとうございました。 |
 大きな手はボールを掴むためのものです。バトルには少し邪魔かも(^^;) |
||||||||||||||||||
| Technical キャッチボールはお馴染みのPSD(GP2D12)を使用しています。左手はボールを検知して掴むために、結構高感度にして使っています。そして右手はボールの持ち替えが成功したかどうかの判定です。失敗したら投げのモーションは起動されません。 2つのPSDを、ジャイロやGセンサと共にRCB3で扱うには付加回路が必要です。ということで、8チャネルアナログ切り替えSWを製作し、サーボのPWM信号で切り替える回路(AD EXPANDER)を作り使用しました。手のサーボを使用していて、PWM信号offで起き上がり用Gセンサ、手を90度ひらくと左手のセンサ、手を一杯にひらくと右手のセンサに切り替わります。サーボを25個も使用しているため、手のサーボの信号を使いましたので色々な制約がありましたが、空チャネルがあれば自由自在に切り替えて使用できることでしょう。 |
 現在、現物はロボスポに委託中です。興味のある方はロボスポに打診してみてください。 |
| 2007.9.2 アムラックスカップ vol.2 準優勝 バトルは無い大会なのに、robo-one#12用の長い腕をつけて参戦。長い腕ゆえに起き上がりに難があったけど、本番中は、さほど問題にならなかった。(ラッキー) 練習中に腕のハイブリッドサーボホーンを破断させるというトラブルがあって、参加が危ぶまれたけど辛くも修理完了。ハイブリッドタイプは、ほんとにバラバラになります(^^;) まあ、その分、サーボを壊さなくてよいのでしょうね・・・ 念願のジャイロを頂きました!(ラッキー) 詳細はこちら しかし、万年2位だなあ(笑) |
| 2007.8.26 第6回 KONDO CUP OPEN-CLASS 優勝 久々のサッカーです。この2ヶ月ほどはバトル一色だったせいか、いまいちのりが良くありません(^^;) しかし、クロムキッドの活躍で、なんと優勝です。今回は、緒戦サーボトラブルで上手く歩けなかったのでキーパーを担当。それでも守れて、かつ攻められたので、サーボ修理後もキーパーを担当することにしました。とりあえず全試合を無失点で押さえられたので役目は果たせたようです。 |
| 2007.8.19 夏戦Ⅲ in RoboCountryIV 準優勝 遠征2日目は香川です。ちょっと寝不足なコンディションでしたが、ロボットの方は途中予防的にサーボ交換したものの動きはバッチリです。新robo-oneリングでの試合でしたが、すごくいいです、このリング! 予選は20点中19点と満点には及ばなかったものの1位! (えまのんさんと同位でした) シード権をもらえて2回戦目からの出走です。 本戦も順調に勝ち上がり、決勝はKZR6との対戦です。最初に1ダウン奪えたものの、何故か操作ミス連発でうまく操作できず負けてしまいました(^^;) メンタル面の問題がありそう・・・ |
| 2007.8.18 ロボプロ競技会 in私のしごと館 Vol.2 準優勝 遠征初日は京都でした。とにかく場数をこなしたい一心での参加です(^^;) おまけに、念願のレグホーンとの対決できました。(NAKAYANさんありがとうございます) 試合形式は4グループに分けてのリーグ戦+トーナメント形式で、沢山試合ができて楽しかったです。 リーグ戦緒戦からレグホーンと対決、リングコンディション不明のまま出走したら、足裏がリングと合わずに機敏に動けません。人間の方も慣れないのかミスばかり(^^;) 完封負けでした。その後は足裏を滑るようにセッティングしてしっかり動けるようになりました。結果、リーグ戦は2位。2位でもトーナメントに参加できるルールで救われました。 さて、次は本戦トーナメント。順調に勝ち上がり決勝は、今日2度目のレグホーンです! 今度はロボットも人間もバッチリの状態でのトライです。こんどは自分的には善戦できたものの、結果は完封まけでした。いや~ レグホーンは強いです!!! |
 直前に体重測定、 これだと重量級ですね |
| 2007.8.5 アムラックスカップ2007 vol.1 優勝!(ロボプロスプリント3000:2位、ロボJUDO:1位) 近場で大会があるというので家族で参加しました。昨日大活躍したrsv3と、KONDO CUP#5以来ほったらかしの素体kunです。最初のスプリントはは昨日同様うまく走れず通常速度での走行としました。それでも、10秒割りで2位、素体kunも11秒ちょっとで3位という好成績です。(1位は、さすがのありまろ7です) バトルでは、なんと優勝をいただきました。賞品はrobovie-iや、色々な副賞をいただきありがとうございました。robovie-iは、早速家族が組み立てて遊んでいます。喋るロボットはいいですね~! アムラックスカップのトロフィー?は、アクリルブロックに虹色に光る照明付でカッコいいです! 家族内では好評でした。 次のアムラックスカップは9/2でサッカーだそうです。 |
 |
| 2007.8.4 ロボットバトル in 大同工業大学#2 準優勝 予選クリアが目標でしたが、コースの作りが・・・ ロボスポで高速歩行を完全調整したつもりでしたがコケまくりです(^^;) どうにも速度が上げられないので、速度を落としての走行となりました。スプリントの順位不明ですが5~6位だったように思います。続いての競技が比較的高得点でなんとか予選通過できました! しかし、バトルの抽選は最悪(^^;) 最初から関西の超強豪軍団とあたってしまいました。バトルの試練には良い機会と気持ちを切り替えて望んだところ、幸運を味方につけ、まさかの勝利!! 決勝までコマを運ぶことができました。決勝の相手は長井で敗退した「ガルー」です。幸運はここまでで、敗退して2位という結果に終わりましたが、初めて賞金も頂、ここまでこれたのは十分幸運でした! |
 |
2007.7.28 ナガレンジャー・ファイティングフェスタ#2 2回戦敗退
2007.7.15 わんだほー3 8位
2007.6.2 ROBO-ONEサッカー 予選敗退
昨年はワケアリで出走できなかったロボフェスに再びトライします。 今回の変更点は、RCB3J→RCB3HVになったことと、腕の回転軸を追加したことです。手先はロボファイトのままなので、足より腕が3cm(112%)長い仕様です。でも、ロボフェスの規定はrobo-one#10だそうなので、特に問題ないですよね? 一部モーションが変わるので、変更しなくてはなりませんが、明日から急遽出張! 改造だけで精一杯で練習時間が全く取れなさそうです・・・ いや、改造も完了するかどうか(^^;) ロボフェスは延期だそうです、rsv3の次の出番はrobo-oneサッカーまでお預けです。 |
 |
| 2007.5.11 ロボファイト5仕様 KONDO-CUPで短くした腕を、元に戻しました。その外の違いといえば、アンテナの付け方で、以前は肩サーボの上を通して後方からアンテナを伸ばしていたのを、直接前側からタミヤの「蛍光アンテナパイプ」を使って前側から伸ばしています(写真右)。ちょっとカッコ悪いけど、無線トラブルになるよりいいですから(笑) KONCO-CUP以降、休みが1日だけだったので、まだバトルモーションができていません! 今日中に仕込まなくては(^^;) 初戦(棄権除く)の相手は、某2006年GPチャンプになりそうな気配、公式戦2度目の対戦です。rsv3のデビュー戦もGP組メジャーロボットだったし、初戦突破するにはGP組を超えろ!ってことですか? うむむ・・・ 2007.5.12 ロボファイト5に参加してきました ロボファイト初参加でした、初参加だと混沌としていて進行がわからない処もありますが、午後には慣れて、なんとなく分ってきました(^^;) スタッフの皆さん、参加者の皆さん、ありがとうございました。 ロボファイトの新リングはツルツルでした。今回、滑り足で参加したら、滑って前に進めません(笑) でも、抜群の防御力なので、滑り足のまま出走しました(^^;) 結果は1戦目不戦勝、2戦目敗退(予想通り)でした。今回も、バトル中何をやってたか余り覚えていません(^^;) 舞い上がっていたんでしょうね。ビデオが公開されたら分析したいと思います。 |
 |
| 2007.4.28 KONDO CUP仕様 基本的な仕様は変わりませんが、サッカー用に腕を3cm短くしました。 福岡から2ヶ月弱、結構猶予があったように思うのだけど、モーションはまだまだ納得ができるものには仕上がっていません。とりあえず、実戦可能レベルかな? でも、「負けない様に頑張ります!」 そういえば、既にサーボを4個壊しました(^^;) 素体kunは先日ギア欠けが2個あっただけで元気だけど、4014はモーターが逝ってしまいます(悲 2007.4.30 KONDO CUP Aリーグ敗退 決勝まで進めませんでしたが、あのカイザーチームに互角に張り合えたのは誇りに思います。あの的確なパスワークは今後のサッカーの主力になるのでしょうね。 |
 |
| 2007.3.17 第11回ROBO-ONE 今度こそ!!!
3/21 進捗状況 縄跳びはOK でも、サーボを壊すのが怖いので、まだ数回しかやったことがありません(^^;) しかし、歩行がNG! 真っ直ぐ走れない、止まれなくて転ぶ、何も無い処で予告無しに転ぶ(謎) まだまだ前途多難! そして、もう1つの課題「人の役に立つこと」は、ネタは仕込んであるものの、大道具は必要だし、ネタ的に安直だし、なんか他のものにしたいな~ でも、素人受けはきっといいだろうな~ 3/25 robo-one#11 参加してきました。 結果は予選38位 予選敗退 でした 詳細はこちら 次はKONDO CUPだ! |
 |
| 2007.3.2 第18回ヒューマノイドカップ仕様 シェイクダウンは福岡でした
3/4 ヒューマノイドカップに参加してきました。準備不足にも関わらず予選14位と辛くも本戦に進めました。横歩きで方向転換して13秒台でしたから、わんだほーでの素体kun以上の速度(40cm/S以上)がでていたようです。前走りは全然調整しきれず、挫折しました(^^;) 本戦は1回戦負けでしたが自分的には善戦できたと思います。シェイクダウンにしては上々・・・ と、しておきましょう。 |
 頭はヒューマノイドカップ暫定仕様です。 手もrobo-oneまでには変更したいな・・・ |
開発コンセプト
rsv3の設計、運用のコンセプトは「勝てるロボットを作ること」、robo-one#15で3位入賞を成し遂げ、一応の結果を残せました。
robo-one#15でオペレータ「チームさくさく」で3位入賞、弱かったのはメカニックだったことが判明! 入賞ロボットを引退させるわけにはゆかないので、永久動体保存されることでしょう・・・