MORI Hiroshi's Floating Factory
Gyro Monorail Workshop
ジャイロモノレール資料館(4号館)

Akubi L.R. gyro monorail No.12 running around the garden
 2009年にジャイロモノレールの模型が走行する動画を公開したところ、最初にメールをいただいたのが、イギリスのP.Healey氏でした。走行装置がなくモノレールではありませんが、ジャイロ・スタビライザとして完成度が高く、また、その実験を動画で公開されていることもあり、例外的にここで取り上げます。
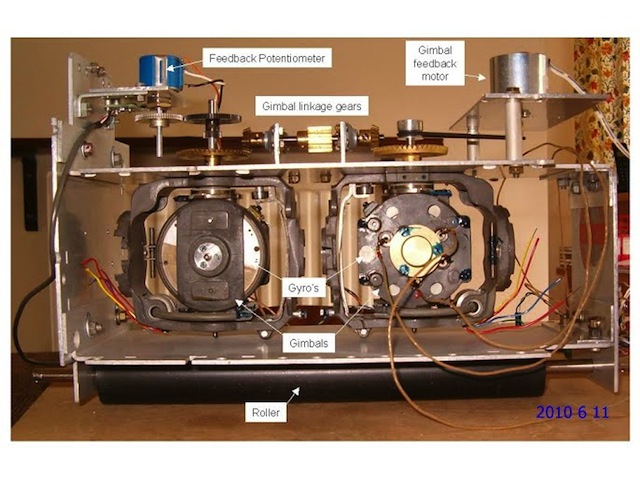
2009年にジャイロモノレールの模型が走行する動画を公開したところ、最初にメールをいただいたのが、イギリスのP.Healey氏でした。走行装置がなくモノレールではありませんが、ジャイロ・スタビライザとして完成度が高く、また、その実験を動画で公開されていることもあり、例外的にここで取り上げます。ツインジャイロで、上部のギアによって対称リンケージを確保。さらに、ポテンションメータ(左上)でジンバルの回転を感知し、モータで加力(右上)しています。制御はマイコンのプログラムで行われていて、電源や制御システムは、外部にあります。 詳しい説明はここに。また、動画はこちらで見られます。制御が的確なため、ほとんど揺動しない、高い安定性が達成されています。 |
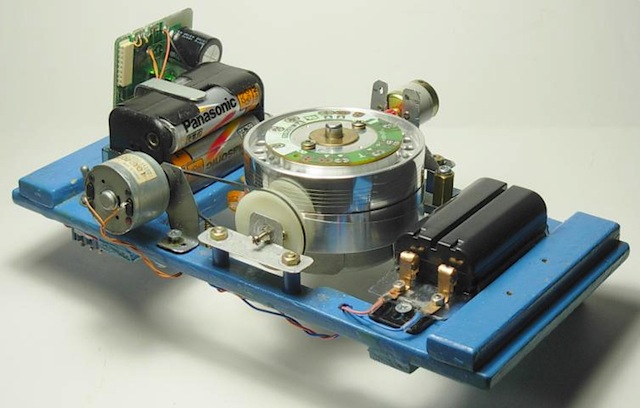
 佐藤隆一氏が製作されたジャイロモノレールです。ジャイロの軸回転を利用した摩擦式のバランシングシステムですが、ジンバルの回転をスリップしつつ伝えるアームによって、この摩擦を得るスリットを左右に動かす点が特徴で、非常に珍しい方式といえます。
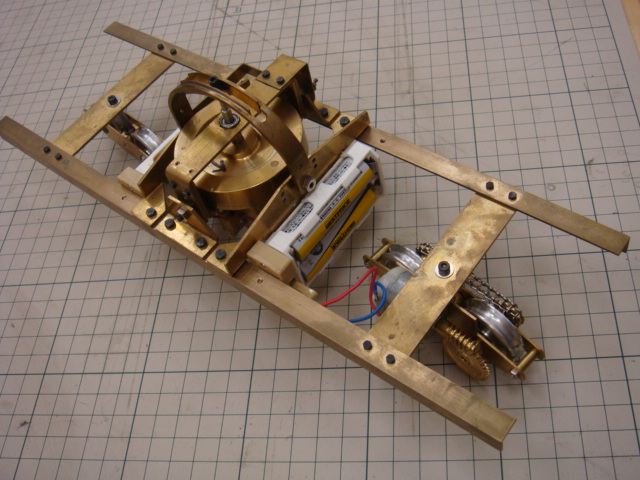
佐藤隆一氏が製作されたジャイロモノレールです。ジャイロの軸回転を利用した摩擦式のバランシングシステムですが、ジンバルの回転をスリップしつつ伝えるアームによって、この摩擦を得るスリットを左右に動かす点が特徴で、非常に珍しい方式といえます。写真は、欠伸軽便に譲っていただいた1号機。佐藤氏は、2号機を同じ設計で製作され、幾つか動画を公開しました。これは世界中から反響があったようで、2014年にベルリン国際鉄道技術専門見本市にも同機が出展されました。 最新の動画はここに。 |
 鉄道模型趣味2010年8月号の製作記事のとおりに工作をされた方は、知っているだけでも5人ほどいらっしゃいますが、成功者は少数でした。その数少ない成功者(走行の動画をアップされている例)をご紹介します。小型ライブスチームの自作品を発表されている3488kousaku氏です(一度メールをいただいたことがあるのですが、お名前がわからないので、メアドの最初の文字で失礼します)。
鉄道模型趣味2010年8月号の製作記事のとおりに工作をされた方は、知っているだけでも5人ほどいらっしゃいますが、成功者は少数でした。その数少ない成功者(走行の動画をアップされている例)をご紹介します。小型ライブスチームの自作品を発表されている3488kousaku氏です(一度メールをいただいたことがあるのですが、お名前がわからないので、メアドの最初の文字で失礼します)。詳しい説明はここに。このページで動画も見ることができます。 |
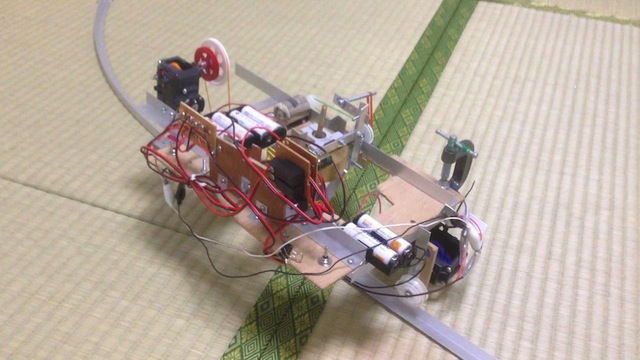
  小池令之氏が製作されたジャイロモノレールで、写真は、数機あるうちの1つ。ジャイロのホイールには、VTRのヘッドを利用されています。成功者の中で唯一、ツインジャイロを採用。写真では、そのツインジャイロの手前のバランシングスイッチが見えています。むこう側には、対称リンケージのため、プーリーに8の字にかけられたゴムバンドがあり、また、同じく加力のためのサーボもプーリーで伝動されています。
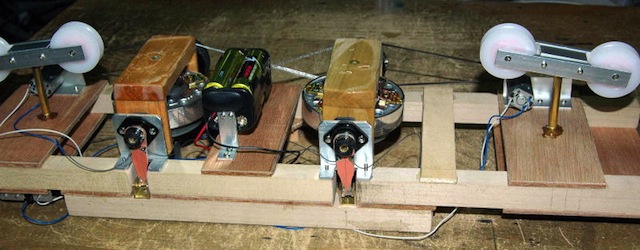
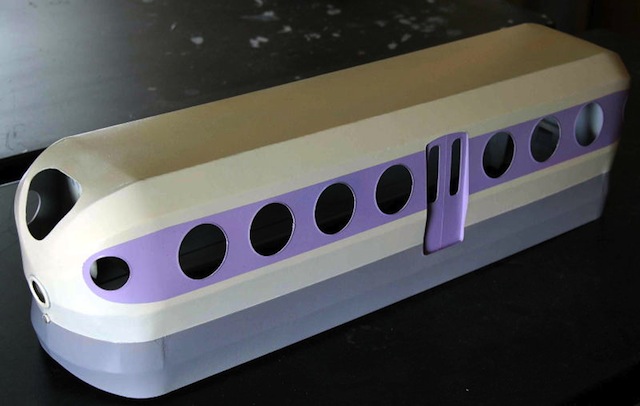
小池令之氏が製作されたジャイロモノレールで、写真は、数機あるうちの1つ。ジャイロのホイールには、VTRのヘッドを利用されています。成功者の中で唯一、ツインジャイロを採用。写真では、そのツインジャイロの手前のバランシングスイッチが見えています。むこう側には、対称リンケージのため、プーリーに8の字にかけられたゴムバンドがあり、また、同じく加力のためのサーボもプーリーで伝動されています。下の写真は、紙製のボディ。このほかにも、プロペラ推進のボディもあり、JAMでも一般公開されました。モノレール用のポイントなども作られています。 詳しい説明はここに。また、製作の過程が、こちらにあります。 |
 mukashitombo氏は、各種のジャイロモノレールを製作されています。軸摩擦方式、そして、サーボモータによる姿勢制御も。新しいものでは、バランシングスイッチのかわりに、モータで回転を検知し、ICでサーボを作動させる方式を採用されています。
mukashitombo氏は、各種のジャイロモノレールを製作されています。軸摩擦方式、そして、サーボモータによる姿勢制御も。新しいものでは、バランシングスイッチのかわりに、モータで回転を検知し、ICでサーボを作動させる方式を採用されています。詳しい説明はここに。また、動画の一例は、こちらにあります。 |
 YK氏が製作されたジャイロモノレール。比較的大きなホイールのジャイロで、バランシングスイッチでサーボを制御しています。また、輪ゴムで反復元力を加えています(ジャイロの重心を上げるのと同じ効果)。
YK氏が製作されたジャイロモノレール。比較的大きなホイールのジャイロで、バランシングスイッチでサーボを制御しています。また、輪ゴムで反復元力を加えています(ジャイロの重心を上げるのと同じ効果)。詳しい説明はここに。また、動画の一例は、こちらにあります。 |
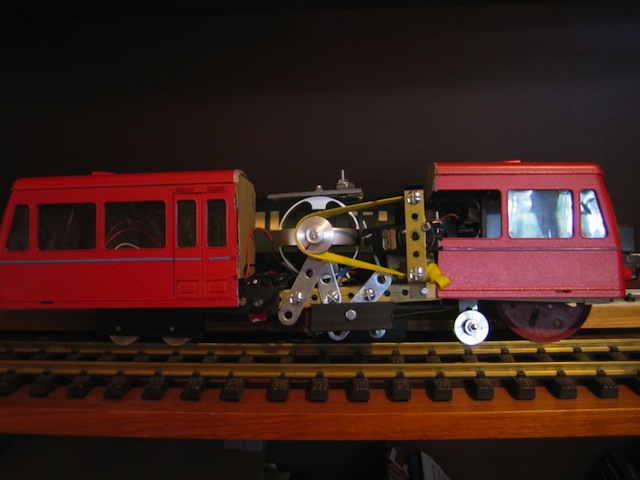 フランスのJ. Veillard氏のジャイロモノレール。OスケールやGスケールでレイアウトを走る車両を試作されています。ジャイロには、2011年に発売されたイギリスのBrightfusion社の高級地球ゴマを利用。最近、サーボ制御スイッチングで行う方式を採用された模様です。
フランスのJ. Veillard氏のジャイロモノレール。OスケールやGスケールでレイアウトを走る車両を試作されています。ジャイロには、2011年に発売されたイギリスのBrightfusion社の高級地球ゴマを利用。最近、サーボ制御スイッチングで行う方式を採用された模様です。詳しい説明はここに。また、ジャイロモノレールのページは、こちらにあります。 |
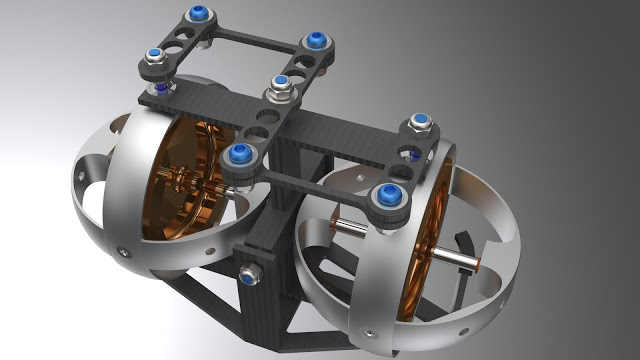 Veillard氏と同じ、Brightfusion社の地球ゴマを使ったツインジャイロのリンケージ。綺麗なCGなのだが、このリンケージは、ジンバルが対称にならず、ただ、2倍のシングルジャイロになるだけ。たぶん、理解していないか、単なる間違いか。
Veillard氏と同じ、Brightfusion社の地球ゴマを使ったツインジャイロのリンケージ。綺麗なCGなのだが、このリンケージは、ジンバルが対称にならず、ただ、2倍のシングルジャイロになるだけ。たぶん、理解していないか、単なる間違いか。 |
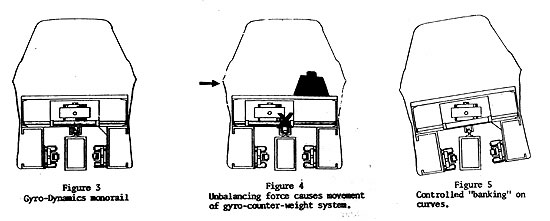 アメリカで1960年代に発表されたGyro-Dynamicsモノレールの概要図。ジャイロの位置を左右に動かし、偏心荷重に備える小粒のアイデア。
アメリカで1960年代に発表されたGyro-Dynamicsモノレールの概要図。ジャイロの位置を左右に動かし、偏心荷重に備える小粒のアイデア。 |
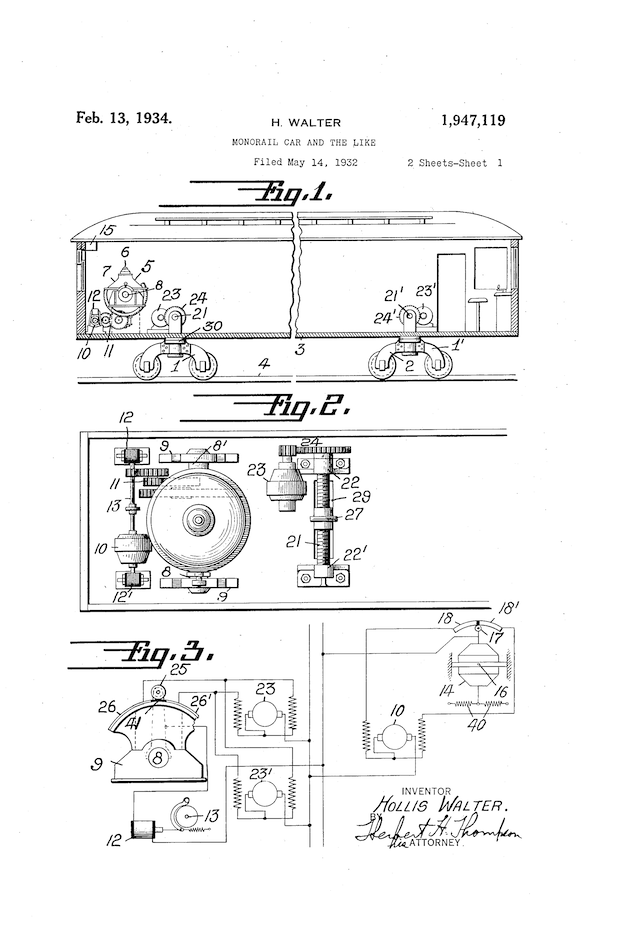 この図は、おもちゃのモノレールの特許のようである。出展は不明。
この図は、おもちゃのモノレールの特許のようである。出展は不明。大変興味深い図で、よく眺めているもの。Fig.1.およびFig.2.のモータ23は、走行用(台車を左右にスライドさせる装置にも見える)。ジャイロは左に。Fig.3.は電気配線図。このFig.3.の左下、13とある部分に、ブレーキを電磁的にかけるような装置が描かれている。 これは、ジンバルを動かすモータ10の軸をギアに伝動する、そのスイッチング機構ではないかと思われる。つまり、モータ10がサーボで、加力したい場合は、ギアを空回りさせる仕組みになっている。Fig.1.およびFig.2.の11は、ジンバルを動かすギアと考えられる(Fig.1.にも、ジンバルの下側に半周のギアと噛み合っている様子が示されている)。 |