MORI Hiroshi's Floating Factory
Gyro Monorail Workshop
古いジャイロモノレール試作モデル紹介
試作1号機~9号機

Experimental model No.9 in 2010
/☆Go Back☆/
試作1号機
試作1号機は、写真が残っていない。2号機とほぼ同じだが、ジンバルが半固定されていて、自由に歳差運動ができないものだった。回転軸の角度を変え、また回転速度を変化させて、そのときの全体の挙動を観察した。このため、バッテリィは搭載せず、外部電源とし、リモコンでモータを制御した。
2009年の11月だったと記憶している。この試作モデルでは、もちろん自立することはない。ただ、すぐに倒れることもない。これは、ジャイロの特徴の1つで、回転軸の方向を維持しようとするためである。多くの人が、ただホイールを回すだけで倒れなくなる、と勘違いしているが、実際には、倒れるのが遅くなるだけだ。つまり、ジャイロが回転することで、見かけ上、質量が増す効果があり、どっしりとした挙動になる、ということ。
ジャイロの物理的な性質は2つある。1つは回転軸方向を維持しようとすること、もう1つは、力を受けた場合に、回転方向に90°ずれた方向へ変位すること。ジャイロ・スタビライザは、この後者の性質を利用している。
試作2号機
1号機のパーツを使って、ジンバルが自由に動く(歳差を許す)ように作り直したものが試作2号機である。
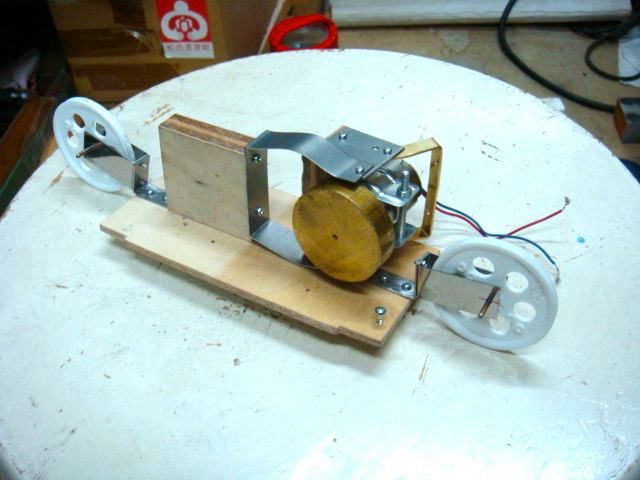
水平軸回転シングルフリージャイロの2号機
マブチの260モータの軸に、直径40mmの真鍮製のホイールを差し入れただけのもので、モータのベアリングだけでホイールを支えている(この構造は9号機まで同様)。したがって、ジンバルは、そのモータを支持している。水平軸回転で、歳差をヨー軸方向に許す構造である。走行装置はない。1号機同様、電源は外部である。
本機は、レールの上で2分程度自立した。ジャイロの回転を上げるほど、自立する時間が長くなることもわかった。この結果に、早とちりして喜び、ジャイロモノレールなんて簡単ではないか、と誤解してしまった。動画を、和田耕作氏(ワダワークス)へも送ってしまった(恥ずかしい思い出)。
あとで考察したことだが、車体が傾くと、ジンバルが歳差し、ホイールが前後に動く。すると、ホイールの回転が、車体の傾きの反対方向となり、つまり反トルクが働く。これによって、姿勢を戻す効果が僅かに発生する。これは、回転するホイールがこのモデルのように剥き出しになっているから生じる(反トルクは空気に対しての効果であるため)のであって、ボディを被せることで、この効果は消える。
車体が軽かったことも、自立した要因の1つである。ちなみに、ホイールの重さは約100gで、車重の50%程度であった。
試作2号機の動画(最後は電源を切り、回転が落ちると不安定になることを示している)
試作3号機
2号機のパーツを使って、ジンバルを作り直したものが試作3号機である。このモデルでは、ジャイロを水平および垂直のいずれにも設定できるようにした。バッテリィも搭載している。
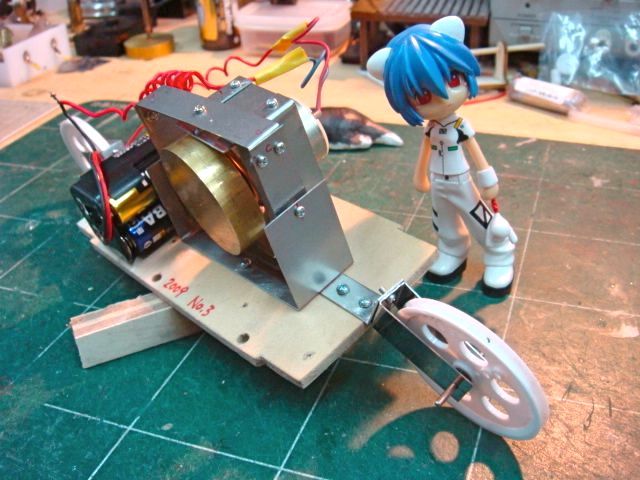
水平&垂直軸回転が可能なシングルフリージャイロの3号機
ホイールとモータは、2号機と同じものであるが、各種の条件で実験を行うために、ネジを緩めるだけでジンバルごと向きを変えてセットし直すことができる。写真では、水平軸回転となっているが、垂直軸回転にセットすることも可能。また、車体の重心を上げることもできる(プーリーのついたフレームを曲げるだけだが)。
本機も、1分ほどであれば自立する。短くなったのは、バッテリィを載せたことによる重量増のためである。
この自立している状態のとき、ジンバルを指で押してやることで、ジンバルコントロールの感覚がわかった。これは、非常に良いデータとなり、のちのバランシング機構開発に役立った。
試作3号機の動画(ここでも、最後は電源を切り、回転が落ちて倒れることを確認している)
試作4号機
3号機に、バランシング機構を取り入れたタイプが4号機である。ジンバルへの加力は、技術的に難しいため、まずは左右にウェイトを移動させる方式を採用した。これは1960年代にアメリカでジャイロモノレールの研究が行われたときに採用されている方式である。
ウェイトの移動は、ラジコンのサーボを用い、外部から手動でコントロールした。結果として、効果は認められるものの、操作が非常に難しいことがわかった。ウェイトを左右に動かして、カウンタバランスとするわけだが、動かすときの加速度が逆に作用するため不安定になりやすい。あとになって確信したのだが、アメリカでこの方式が採用されたのは、イギリスのBrennanの特許を回避するための余分なオプションだったのではないか、と思われる。アメリカの雑誌などには、このアメリカ製のジャイロカー、ジャイロモノレールが世界初のものであると謳われていて、イギリスへの対抗意識がまだこの当時にはあったのかもしれない。
結果として、このウェイトシフト方式は不採用となった。
試作4号機の動画(ウェイトを左右に動かしてバランスを取る操作は自動ではなくマニュアル)
試作5号機
4号機は、小さなジャイロのまま、バッテリィやサーボを搭載したため重量が増し、不安定になってしまった。そこで、新しいジャイロを製作することになり、どうせならば、とBrennanが提唱しているツインジャイロとした。これを搭載したのが5号機である。ホイールはこれまでと同じものだが、2つになったことで、制御トルクは2倍になっている。
水平回転軸ツインフリージャイロの5号機
試作6号機
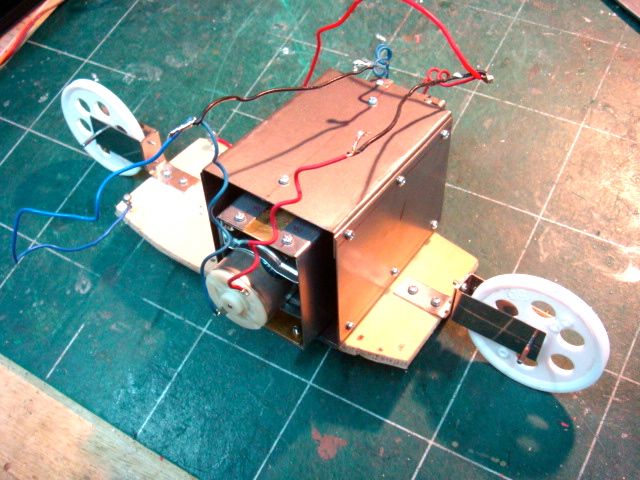
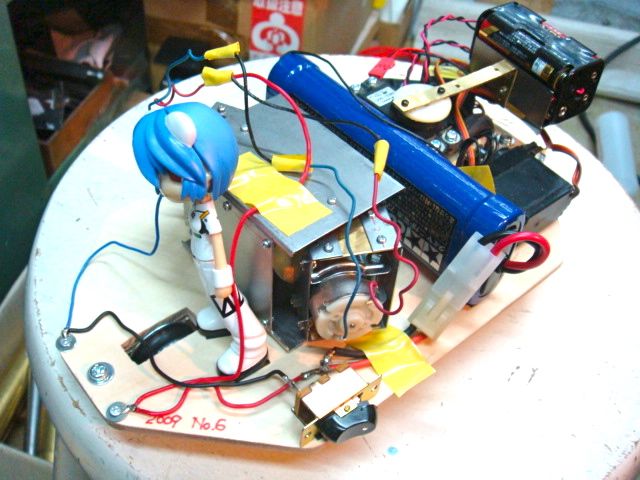
5号機のツインジャイロを新しいシャーシに載せ換えたものが6号機である。バッテリィの他、ラジコンの受信機も搭載し、自律型(オートマティック)を目指した。下の写真は、初期の実験で、ウェイトシフト方式を試している。
水平回転軸ツインジャイロの6号機でウェイト移動方式の試験
上の写真では、ジャイロの電源は外部だった。下の写真では、ニッカド電池を載せて、完全に自律系となっている。左右にシフトさせるウェイトとして、受信機の電池ボックスを利用している。
同じく6号機でウェイト移動方式の試験
下の写真は、初めてサーボによるジンバルコントロールを試みたときのものである。ラジコンのサーボから歯車を半分取り除き、無電時に軽く回転するようにしたものを、加力サーボとして用いている。また、そのサーボを動かすためのバランシングスイッチの試験も行っている。
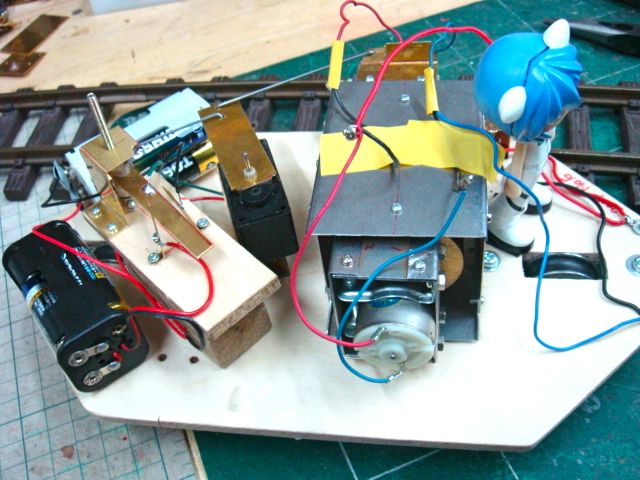
6号機で、サーボによるバランシング装置(サーボモータ、バランシングスイッチ)を初めて組み込んだ。
6号機のこの実験が、ジャイロモノレール模型の実現で最大の成功だった。実現の目処がようやく見えてきた。
しかし、このジャイロでは、すべての装備を載せることは困難であると判断した。このため、最終的には、6号機はサーボモータをマニュアルで操作して自立させるモデルとなった。最後には、走行装置を製作し、ゆっくりだが前後に走らせることができた。また、半年後に、JAMコンベンションに展示する機会に、ボール紙でボディも作製した。このときには、Lehmannのおもちゃのデザインを踏襲している。サーボによるジンバルコントロールの成功を記念して保存モデルとなった。

JAMでの展示に向けてボディが被せられた6号機
試作6号機の自立実験の動画(ジンバルに加える力は、リモコンで操作している)
試作7号機
試作7号機は、6号機の実験中に製作を開始した。下の写真のように、垂直軸回転で、より大きなホイールを回すシングルジャイロとした。ホイールは40mmから50mmになり、重量は約2倍となった。モータもより強力なマブチ380を採用した。すべてのメカニズムを載せるには、強力なジャイロが必要だと、6号機の試験で感じたからだった。
製作途中の試作7号機(奥は、試作6号機)
しかし、6号機でサーボによるバランシングシステムが有望との結果を得て、7号機は未完成のまま、次の8号機を製作することにした。結局、9号機が成功したあとになって、7号機を作り直し、「鉄道模型趣味」誌に製作記事を発表した(詳しくは、こちらを)。

完成した試作7号機
このような経緯のため、この7号機では結果的に、車両重量に対するジャイロホイール重量が10%程度と比較的小さい設定となってしまった(それだけ、あとから作り加えたことで車重が増した)。試作機の中では、最も安定が悪く、この製作記事を読んで自作された方に、ぎりぎりの設定であることが正しく伝えられなかった。この点に責任を感じ、反省している。
試作7号機の動画(バランシングを自動で行う様子を示している)
試作8号機
試作8号機は、試作7号機のシャーシに、新しいツインジャイロを搭載したモデルであり、走行装置はないものの、初めて、すべてのメカニズムを搭載し、自動でバランシングを行うことに成功したモデルである。この成功は、2009年の年末であった。
初めて完全な自動バランシングに成功した試作8号機
6号機のツインジャイロでは能力不足と判断し、7号機に用いようとしていたホイールとモータを使用して、ツインジャイロを製作した。ホイールは50mm径、モータはマブチ380である。ジャイロは、アルミアングルで組まれたフレームに収まっている。当初は、2つのジャイロのリンケージは斜めのロッドで行っていた。

製作途中のツインジャイロ
下の写真が、ジャイロのフレームに、サーボモータ(左)とバランシングスイッチ(右)を取り付けた状態である。サーボモータは、ラジコンのサーボからギアを減らしたものを使用した(505と記されているのは、JR(日本遠隔制御)の505型サーボのため)。ホイールは、このときは168gであったが、のちに9号機に用いるとき、200g以上のものに取り替え、モータもさらに大型のものに交換している。
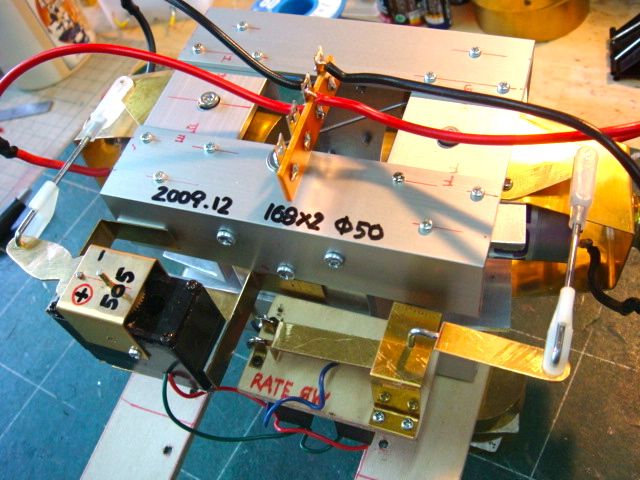
サーボとバランシングスイッチを取り付けたジャイロユニット
ジャイロの能力は充分で、片側に300g程度のウェイトを載せても、倒れることはなかった(ウェイトを載せた側を持ち上げて、反対側に傾いてバランスを取る)。
試作8号機の動画(初めて自動バランシングに成功した様子で、7号機よりもこちらがさきだった)
試作9号機
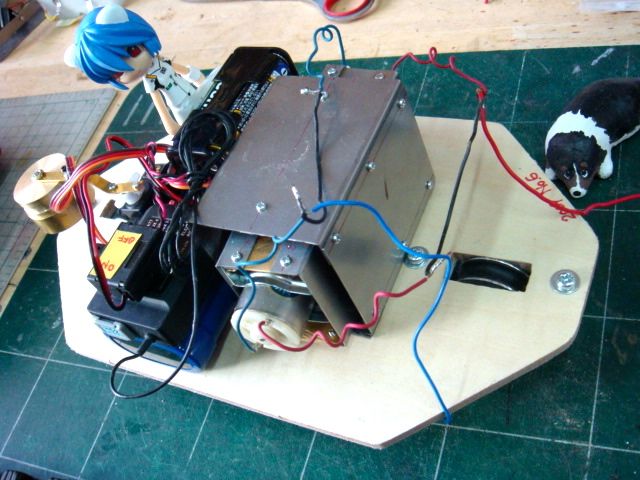
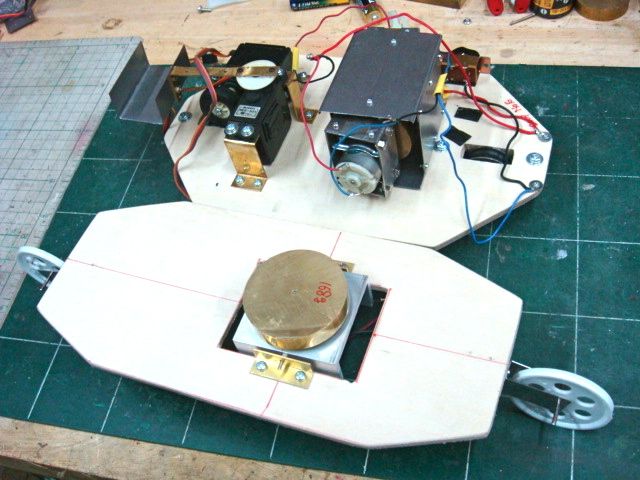
試作8号機で自動バランシングに成功したので、このジャイロユニットを載せ換えて、走行するモデルを作製することとなった。ジャイロは、もともとこれらの重量を想定して設計されていて、8号機はバランシングの確認試験を行うためのものだった。結果的に、この9号機が、エンドレスの線路上を走行する初めてのモデルとなった。走行シーンの動画をアップしたのは、2009年12月26日である。

ジャイロモノレールの機能を初めて満たした試作9号機
ツインジャイロのユニットは、フレームが8号機と同じものだが、ホイールもモータもサイズアップしている。また、両方のジャイロの歳差を対称にするためのリンケージは、斜めロッドではなく、上部に取り付けられた4枚の平ギアによって行っている。ギアを用いると、角度が大きくなったときの差動がない。
また、ジンバルに加力するためのサーボとして、上部に2つのモータを取り付けた。この点も8号機から進歩している点である。
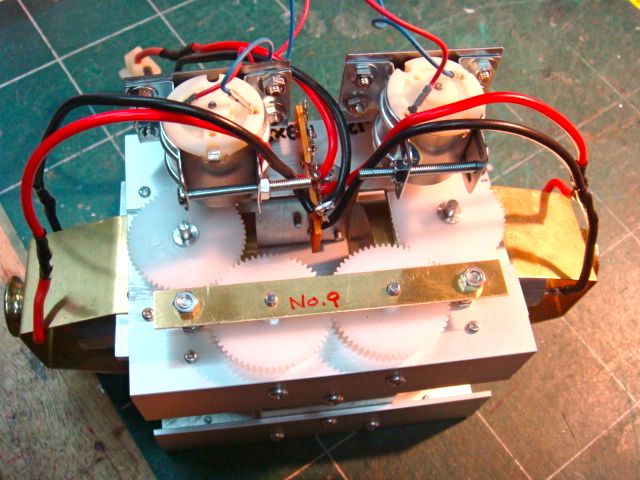
ツインジャイロユニット(上部にあるのがサーボ用モータ)
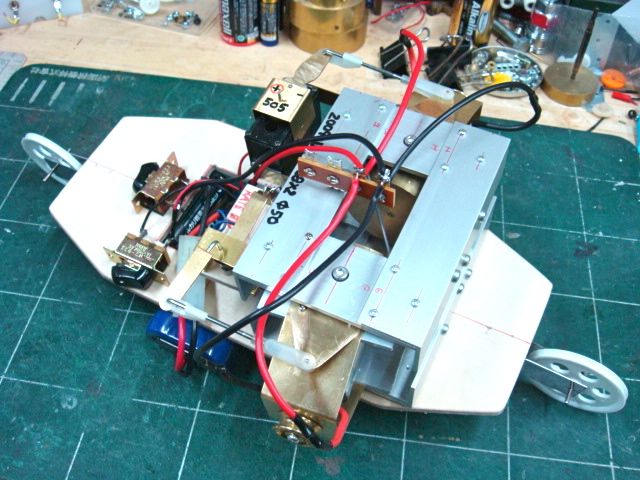
バランシングスイッチも新しいものを作り直した。下の写真の黄色いプレートの部分がスイッチ部で、これにより、2つのリレーを作動させて、奥の2つのモータの制御を行う。
この写真で見えているが、ジャイロのホイールを回すモータは、タミヤのRS-540スポーツチューンモータが用いられている。このジャイロでは、ホイールを支えるのはモータ軸であり、モータのベアリングの強度が問題となるためである。
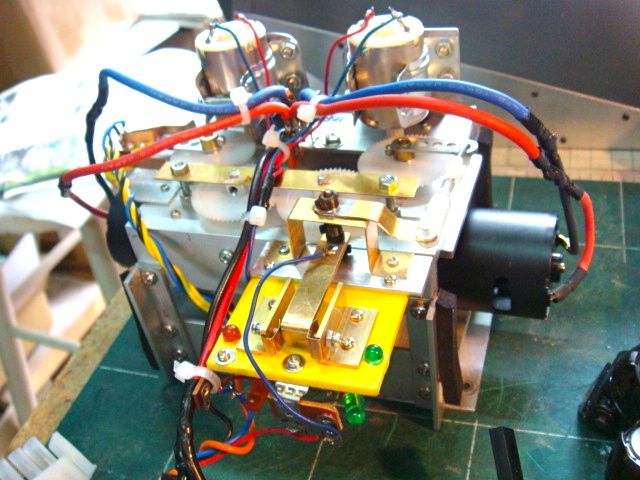
新しいバランシングスイッチを取り付けたジャイロユニット
9号機については、「鉄道模型趣味」誌に諸元を発表している(詳しくは、こちらを)。

アルミ製のボディが完成した試作9号機
下の動画が、バランシングの機能を示したもの。偏ったウェイトを載せると、そちらを持ち上げてバランスを取る。カーブを曲がるときの遠心力に対しても同様に反対側に傾いて走行する。動画の最後に、バランシングスイッチの作動が映る(オレンジと緑のLEDの点灯が、左右のスイッチングを示している)
試作8号機の動画(ペンチを左右に載せて、バランシング機構の試験を行っている)
試作10号機~12号機のページへ
/☆Go Back☆/
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)