MORI Hiroshi's Floating Factory
Gyro Monorail Workshop
ジャイロモノレールの理論と実験
2010


Gyro monorail No.7 and No.9 running in Bentengaoka garden 2010.
/☆Go Back☆/
「鉄道模型趣味」(機芸出版社)2010年5月号および6月号に掲載された記事の再録です。機芸出版社の許可を得て公開しています。

「鉄道模型趣味」誌掲載時のページ(2010年5月号および6月号)
★このページの写真や図面はクリックすることで大きなサイズで見ることができます。
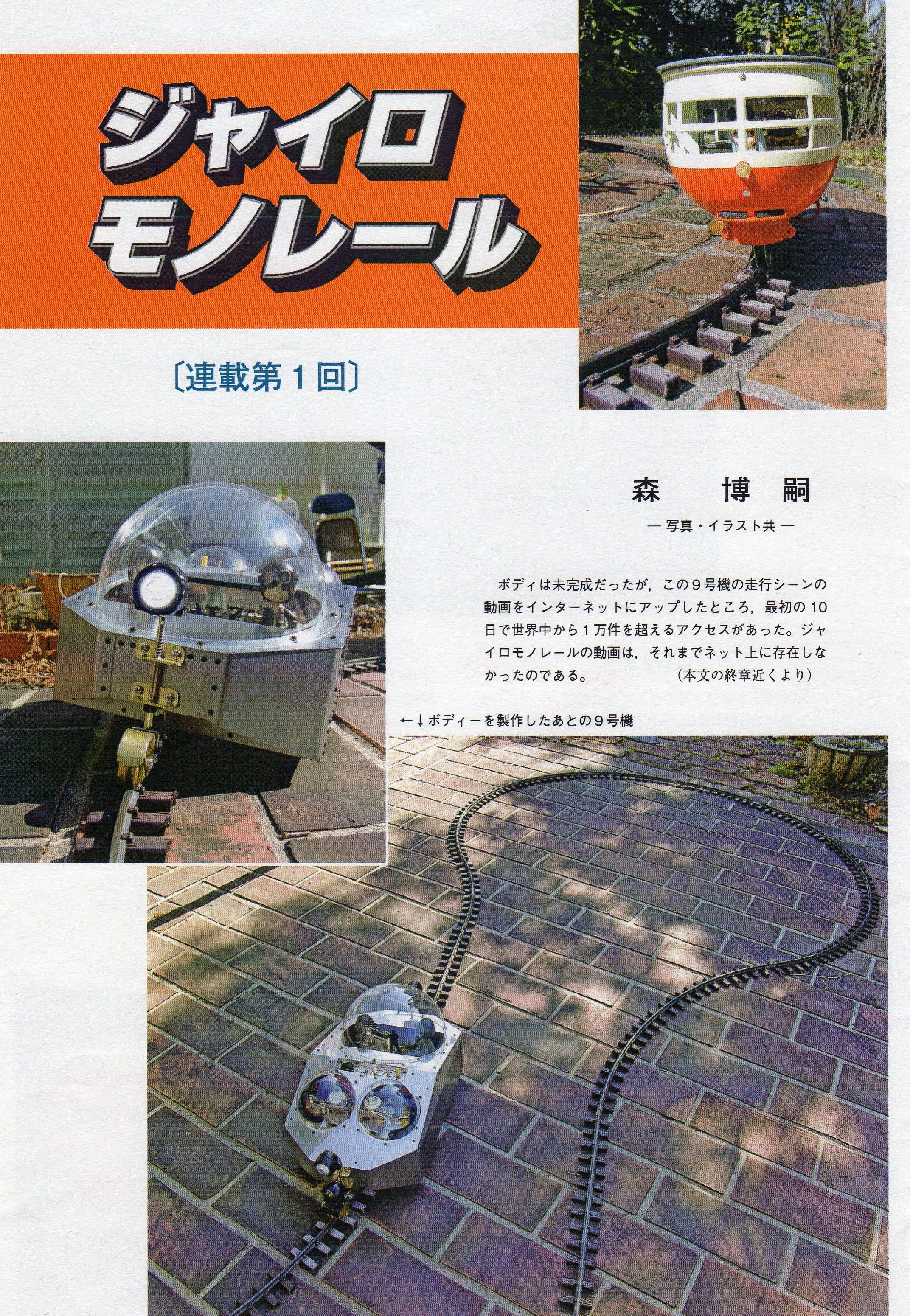
ジャイロモノレール
Gyro monorail
森博嗣(写真・イラスト共)
MORI Hiroshi
1. いきさつ
2007年夏に開催されたJAM国際鉄道模型コンベンションに井上昭雄氏が出品された自作機関車の中で、ひときわ注目を集めたのが、赤いジャイロモノレール(写真-1)だった。ただ、残念ながら、この模型は未完である。実は、それ以前から井上氏がこの前代未聞の模型にチャレンジしていることをご本人から伺っていた。それどころか、アドバイスを求められたことさえあった。師と仰ぐ方からの珍しいお言葉だったため少なからず緊張した。おそらく、筆者が大学で力学を教えていたから尋ねられたのだろう。

写真-1 井上昭雄氏製作のジャイロモノレール(2007:井上昭雄氏撮影)
専門は多少違い、粘性流体の数値解析である。理論式を展開するよりも、プログラムを組んでしまう分野だ。ただし、大学改革のときに教養部が解体され、学部生の数学の講義を担当しなくてはいけなくなった。他学科へも出向き、ベクトルの外積・内積、微積などの講義をさせられた。不慣れなのでかなり勉強をした。受験勉強はほとんどしなかったが、仕事となるとやらざるをえない。授業後によく学生から「何の役に立つのですか?」と質問されたが、それは筆者自身も問いたかった。だがしかし、どうだろう……、今回このジャイロモノレールを成功させるためには、まさにその数学が必要だったのである。
動くおもちゃが大好きで、その関係で鉄道模型を小学生のときに始めた。モータで前進するだけだから他の模型に比べると機構的に一見簡単だが、意外にも、走る曲がるというだけでなかなか奥が深い。ようやく最近になって、ギアボックスをまあまあ使える程度に自作できるようになったという不器用な工作マニアである。しかし、ジャイロモノレールは、鉄道模型の中に置いてみれば、極めて特異で、そしてなによりもメカニック的に面白い、と思う。ラジコンのヘリコプタよりは簡単だが、調整は同じくらい難しい。
とにかく、何台か試した結果、ようやく最初のハードルを越えたように思えたので、憧れの雑誌TMSへ初投稿することにした。

Gゲージサイズの7号機(9号機よりも新しい)
2. 歴史的背景
ジャイロモノレールは、1本のレールの上を走る鉄道である(道路を走るジャイロカーも存在した)。ホイールを回転させたジャイロを搭載しているが、このジャイロの歳差(すりこぎ)運動によって、横方向のバランスを取る。停止しているときでも、倒れることなく自立している。他のモノレールと決定的に違うのは、既存の鉄道のレールを走ることができる点である。1本しか使わないので、ゲージも関係ない。
ジャイロモノレールは、Louis Brennanによってイギリスで発明・開発されたが、ほぼ同時期にドイツでAugust Scherlもこれを製作している。いずれも、フルサイズのプロトタイプが20世紀初頭に作られ、博覧会などでも公開された。
このモノレールの利点は幾つかあるが、最もアピールする点は、高速で急カーブが曲がれることである。飛行機のように傾いてカーブを曲がるため、搭乗者が遠心力の影響を受けない。したがって、同じ速度でもずっと急なカーブを設定できるので、鉄道の敷設計画に有利となる。
安全面ではどうなのかというと、2本レールの鉄道のように、限界を超える横力で突然倒れるようなことがなく(逆に力を受けた方向へ倒れようとする)、また脱線しても横倒しにならないため、むしろ安全だと開発者は主張していた。
ジャイロモノレールの発明は、当時の日本でも報道され、鉄道の歴史を変える発明とまで評された。ただ、機関車だけでなく、貨車や客車にもすべてジャイロが必要になり、エネルギィ的にも機構的にも無駄が多いことが欠点として挙げられる。
インドやロシアで、計画あるいは着工段階までいったものもあったらしい。しかし、結局は実現しなかった。唯一、Brennanが博覧会用に作ったデモ車(20人以上乗れるサイズ)が、遊園地で20年間ほど運用されただけであり、1930年には姿を消した。
Brennanのあと、ロシア人のPyotr Shilovskyが研究を続けたが、鉄道ではなく、ジャイロカーの開発に主眼が置かれた。また、1960年代に、アメリカでも一時期研究がされたものの、Brennanのプロトタイプのレベルから大きな進展はなかった。
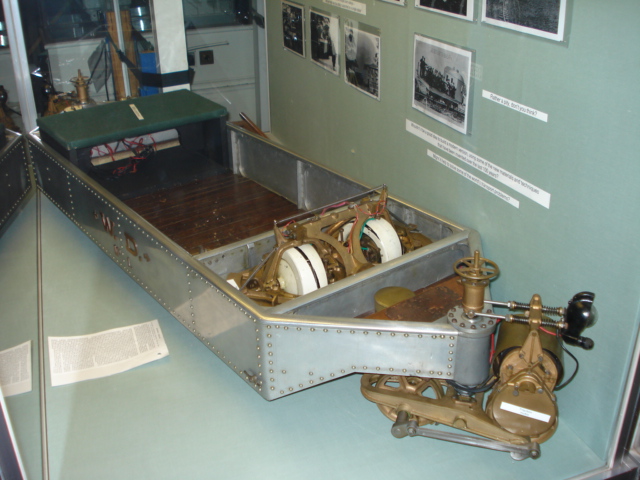
写真-2 Brennanが製作した小型のジャイロモノレール(ヨーク国立鉄道博物館:星野公男氏撮影)
Brennanは、研究の初期にジャイロモノレールの模型を製作している(写真-2)。自分の庭に線路(ガスパイプをレールに使ったらしい)を敷き、これを走らせた。車長は1.8m、車幅46cmのもので、急カーブや急勾配を走り、ワイヤロープを渡しただけの橋を渡ったという。自分の娘をこれに乗せてデモンストレーションをしている写真も残っている(図-1)。
図-1 Brennanのデモンストレーション
このモノレールは一見して不思議なので、かなり話題になったようだ。インパクトがあったのだろう。ジャイロモノレールの模型やおもちゃが沢山作られているし、また、科学雑誌などにも、未来の乗りものとしてジャイロモノレールのイラストが多数掲載されている。
当時モノレールが注目された理由は、もちろん高速化のためであった。未来の高速鉄道を想像したとき、人々が思い浮かべる理想的な形態が、ここにあったのだろう(図-2)。
図-2 未来の乗りものとして脚光を浴びたモノレール
3. 原理と仕組み
簡単に言ってしまえば、「ジャイロによって安定性を確保している」ということになる。「コマは倒れにくい、だから大きなコマを車内で回し、この効果で立っているのだ」という理解は半分は正しい。しかし、それでは言葉による説明にすぎず、科学的な知識あるいは理解ではない。それに、ただホイールを回すだけではジャイロモノレールは成立しない。
ところで、自転車やオートバイなどの2輪車は、ジャイロがなくても左右のバランスを取って走ることができるが、これは走行中に進路を自由に変えられるためである。レールの上に車輪があり、横方向の動きが制限されると、もう2輪車は走れない。線路の上を走る方が技術的に難しく、どうしてもジャイロが必要になる。
さて、そもそも、コマは何故倒れないのか。「回転しているものは倒れない」という理屈はどこから来るのだろう。
コマが倒れないのは、後述する「ジャイロ効果」すなわち「力を受けた向きとは異なる方向へ変位する性質」のためである。また、コマの軸が地面に接している部分に摩擦が働くため、回転の反トルクがコマに作用し、これが軸の傾きを戻そうとする。仮にコマの軸先を針のように尖らせ摩擦を小さくすると、コマはうまく立てなくなる。
3.1 ジャイロ効果
回転している物体に、その回転軸を傾けようとする力が加わると、その力の方向ではなく、回転の向きへ90度ずれた方向へ軸が傾く(図-3)。地球ゴマがあれば、手軽にこれを体感することができる。不思議な力を受けたように感じるだろう。
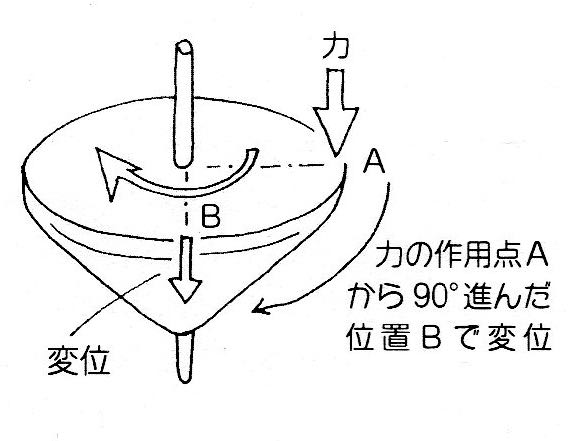
図-3 ジャイロ効果
ジャイロ効果を数式(ベクトル外積)を用いずに説明することは難しいが、横風を受けて風下へ流される自動車を思い浮かべてもらいたい。走っている車が横風を受けた場合、走った先へ行った位置で最も横へ逸れる(図-4)。三角関数のサインカーブを積分すると位相が90度ずれたカーブになる原理である。回転しているものは、この横風を受ける場所を何度も繰り返し通り過ぎるわけだから、その回数が増えるほど影響が大きくなる。したがって、速く回転するほど、この90度ずれたトルクも大きくなる。
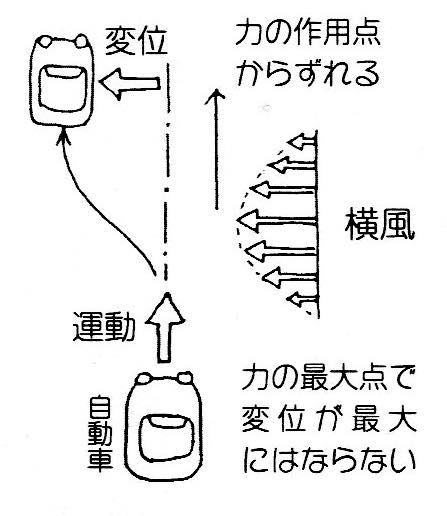
図-4 横風を受ける車
モノレールにジャイロを積んでいれば、車両がロール軸に対して傾くと90度ずれた方向へジャイロは傾こうとする。また逆に、ジャイロを傾けようとすれば、90度ずれた方向へ車両が傾こうとする。このように、ジャイロを搭載すれば、ロール軸の回転を、ピッチ軸あるいはヨー軸の回転に変換することができる。モノレールが不安定なのはロール軸だけであり、他の2軸はレールと車輪によって反力を確保できる(図-5)。この理屈によってロール安定を得るのである。
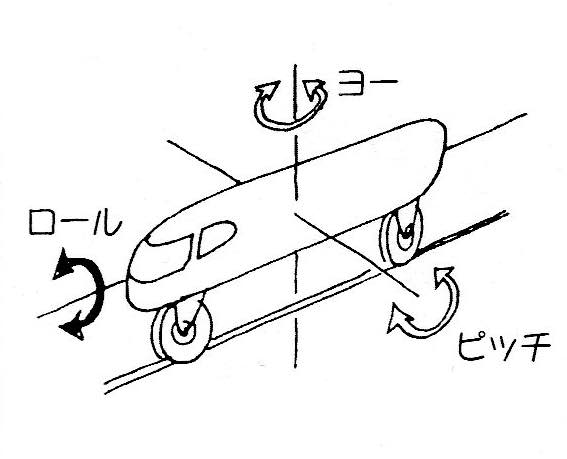
図-5 3つの軸
3.2 歳差運動
コマはある方向へ傾くと、それと90度ずれた方向へ倒れようとする。しかし、その方向へ傾くと重心がずれ、重力がコマを倒そうとする。するとまた、そこから90度ずれた方向へ変位するジャイロ効果により、結果として、コマはぐるぐると「すりこぎ運動」をすることになる。これが「歳差(precession)」である。ジャイロの運動には、この歳差のほかに、高周波成分の章動(nutation)があり、実はやっかいな問題であるがここでは論じない。おおまかにいえば、模型の場合は装置の摩擦などで章動は減衰することが多いと楽観的に考えることにする。
地球ゴマには、普通のコマと違い、回転しないフレームがある。このフレームの脚の先には細い溝があり、糸などにのせ、地球ゴマに綱渡りをさせて遊ぶことができる。糸のかわりに、リングのコースを猛スピードで周回する競争ゴマというおもちゃも販売されている(写真-3)。

写真-3 地球ゴマと競争ゴマ(タイガー商会製)
地球ゴマを搭載するだけでジャイロモノレールになるかというと、残念ながら簡単にはいかない。まず、地球ゴマを2本脚にするだけで、立たなくなる。1本脚よりも2本脚の方が安定しているだろうと考えがちだが、そうではない(図-6)。これは、脚が2本になることで、その方向へ傾けなくなり、すりこぎ運動が自由にできなくなるためである。競争ゴマも1輪だし、古いドイツのおもちゃでゼンマイのジャイロモノレールがあるが、これも1輪車だった。
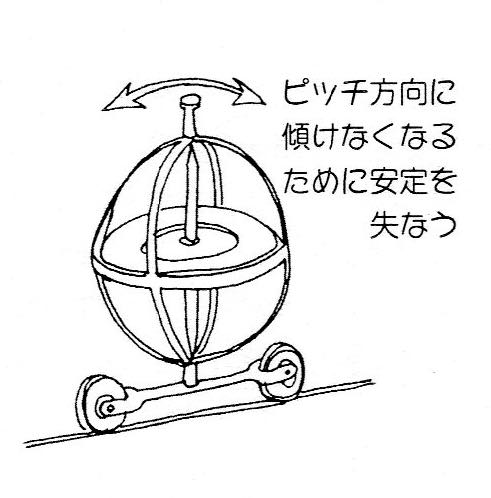
図-6 2本脚の地球ゴマは立たない
したがって、ピッチ軸に傾けないモノレールの車体にジャイロを載せる場合には、ジャイロをジンバルと呼ばれるフレームに収め、このジンバルが自由に傾けるようにしておく必要がある(図-7)。
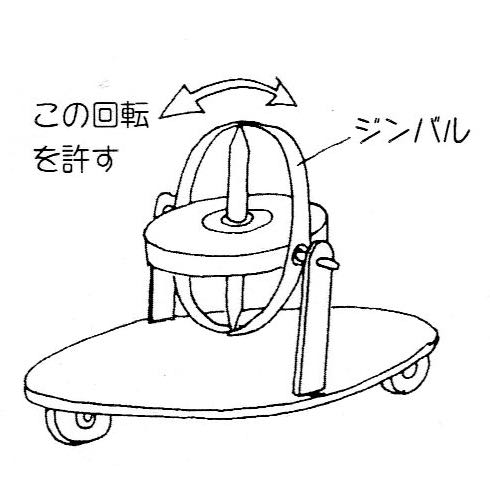
図-7 歳差運動を許すジンバル
3.3 モノレールに必要なジャイロ
地球ゴマは動力がなく、最初に与えられた回転力は摩擦によってしだいに減衰する。これに動力を取りつけて高回転を維持する仕組みがジャイロである。
モノレールにジャイロを搭載する方法は2種類ある。ジャイロの回転軸は、車両のロール軸ではない方向へ向ける必要があるので、残された2軸の垂直か水平横方向になる(図-8)。そして、ジンバルの歳差運動を、さらに残ったもう1つの方向へ許す。すなわち、垂直軸ジャイロならば、ピッチ軸にジンバルが歳差し、水平横軸ジャイロならば、ヨー軸に歳差をさせることになる。
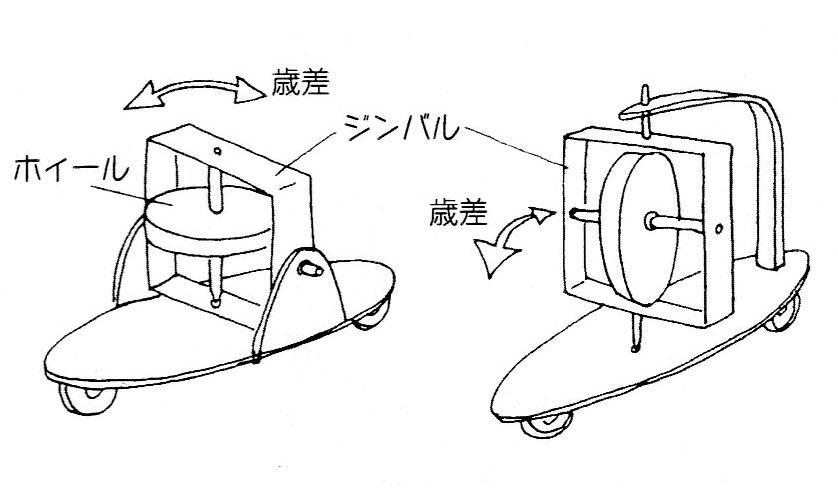
図-8 モノレールにジャイロを積む2種類の方法と歳差運動の方向
もしモノレールが直進しかしない場合は、ジャイロは上記のいずれかで充分である。しかし、乗りものである以上、路線にはカーブがあり、起伏による勾配もある。
ロール軸の安定をジャイロによって確保するわけだが、ジャイロは、回転軸に垂直な残るもう1軸の傾き(回転)にも同様に反応してしまう。つまり、垂直ジャイロならばピッチ軸、水平ジャイロならばヨー軸の回転を、車両の「傾き」と解釈してしまうことが問題となる。
これを解消するために、Brennanが思いついたアイデアは、2機の逆回転するジャイロを用いることだった。2つのジャイロどうしが不要な方向の歳差運動を相殺する仕組みである。この発明によって、一挙にスタビライザとしてのジャイロが実用に近づいたと伝えられている(モノレールだけでなく船舶や魚雷にも利用された)。
ところで、フルサイズの乗りものとしては、このジャイロを駆動するエネルギィが心配になるが、100年まえに作られた実車では、ジャイロのホイールを真空の容器内に収め、摩擦を極力なくすことで高い効率を確保していた。一定の回転数が得られれば、その回転を維持するエネルギィは摩擦に依存している。この真空中で回るホイールは、電源が切れても30分以上回転を続けたという。機械的なトラブルに際しても、車両を停止させ、避難をしたり、倒れないための支えを用意する時間は充分にあった。
ちなみに、井上氏が製作されたモデルには、ラジコン飛行機のパーツを使った引込み脚が装備されていた。実に楽しい発想である。筆者もいずれは、もう少し大きなジャイロモノレールを製作し、このようなギミックを組み込んでみたいと考えている。
3.4 バランシングシステム
3.4.1 フリージャイロ
自由に歳差運動をするジャイロを搭載するだけでも、狭い範囲ならば安定を得ることができる。これは、ジャイロのジンバルが傾いて回転軸が車両のロール軸に近づけば、ホイール回転の反トルクが車両の傾きを戻す方向に作用するためである(図-9)。ジャイロに対してある程度軽い車両ならば、これで自立が可能である。この効果を高めるためには、反トルクが大きくなるようにホイールの空気抵抗を大きくすべきである。
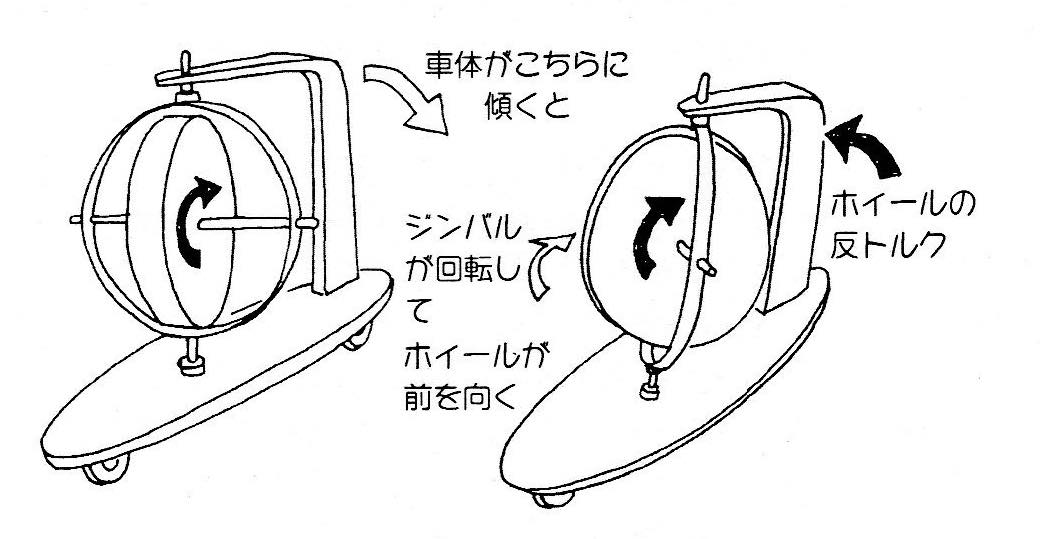
図-9 ジャイロの反トルクによる復元力
しかし、この反トルクによる復元力は比較的小さい。ジャイロをモータで回せばバッテリィなどで重量増になるうえ、モノレールを走らせるための機構も必要である。さらに、前述のように、カーブを曲がるためには、シングルのフリージャイロでは不可能で、ツインジャイロが必要になり、2機のジャイロのリンケージも加わる。これらの全重量を支えるには、フリージャイロは非力すぎる。さらに、カーブを曲がれば遠心力が作用する。たとえツインジャイロであっても、回転の反トルクだけではとうてい持ち堪えられない。
そこで必要になるのが、アクティブにバランスを取る仕組みであり、ここではバランシングシステムと呼ぶ。これには各種の方法がある。
3.4.2 ウェイトシフト法
最も単純で誰もが発想するのは、ウェイトを左右にシフトさせる手法だろう(図-10)。この方法は、実車でも採用されたことがあるらしい。筆者も模型で幾つか実験を行った。しかし、模型では微妙なコントロールが難しく、サーボモータで重りを動かそうとすると、その初動時に反対方向の加速度が生じてしまう。効果がないわけではなく、マニュアルでサーボを動かして小型の模型を自立させることは充分に可能だが、ラジコンヘリをホバリングさせるときのような熟練した操作が必要である。これを自動化するためには、マイコンを使った電子制御が不可欠になるものと思われ、今回はひとまずこの手法は断念した。
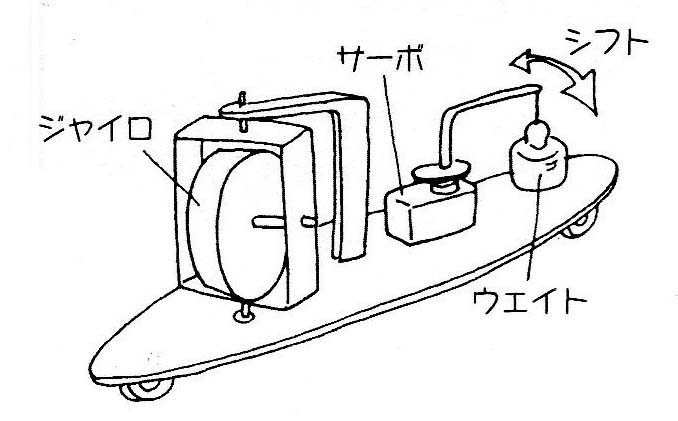
図-10 ウェイトシフト
3.4.3 正帰還ジンバルコントロール法
次に考えられるのは、ジャイロ効果の理屈に立ち返った手法である。これは、ジャイロのジンバルが動いた方向へさらに加勢する力を加えるもので、その理論を示した文献には「正の帰還(positive feedback)」あるいは「負の摩擦(negative friction)」と表現されている歳差運動の減衰手法である。
どのようにしてジンバルに力を加えるのか、ということが問題になる。これも各種の方法が考えられる。
(1)ポテンシャルによる正帰還
たとえば、垂直ジャイロであれば、少しでもジンバルが傾けばひっくり返ってしまうように、支点よりも重心が上にある不安定なバランスに設定しておけば良い(図-11)。こうすれば、重力による「正の帰還」で自動的にジンバルの動きに力が加勢される。この不安定さこそが、全体の安定性に寄与するのだから、不思議といえば不思議である。普通に考えると絶対に思いつかない手法であり、理論を知っていないと試すことさえないだろう。
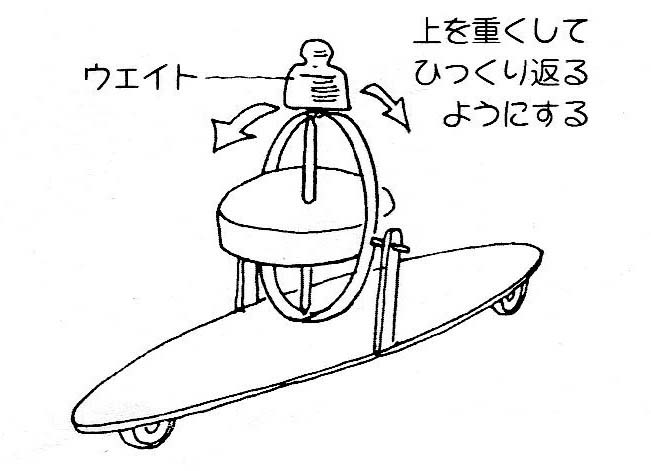
図-11 不安定が安定を生む
この重力を利用する方法については、もちろん沢山の実験を行った。また、重力ではなく、バネを使った仕組みでポテンシャル的な不安定さを作る方法でも、実験を何度も繰り返した。だが、いろいろな理由でうまくいかないことが判明した。最も大きな問題は、初期設定が難しいことである。ちょうどバランスが取れた位置からスタートさせることが、模型では極めて難しい。理論では可能でも、現実的ではないと判断せざるをえない。ただし、この理屈は非常に重要で、ジャイロを安定したバランスで支持することが車両としての安定性ではマイナスになる、という点を注意すべきである。
(2)軸摩擦による正帰還
次に、Brennanの初期の模型に用いられたと伝えられる手法として、車両が傾いたときジャイロの回転軸を車両のシャーシと接触させ、ここで生じる摩擦によってジンバルを動かす方法がある(図-12)。実は、コマの軸が地面に接しているところでもこれと同じ摩擦が生じ、軸を移動させ、コマを直立させようとする力が働く。
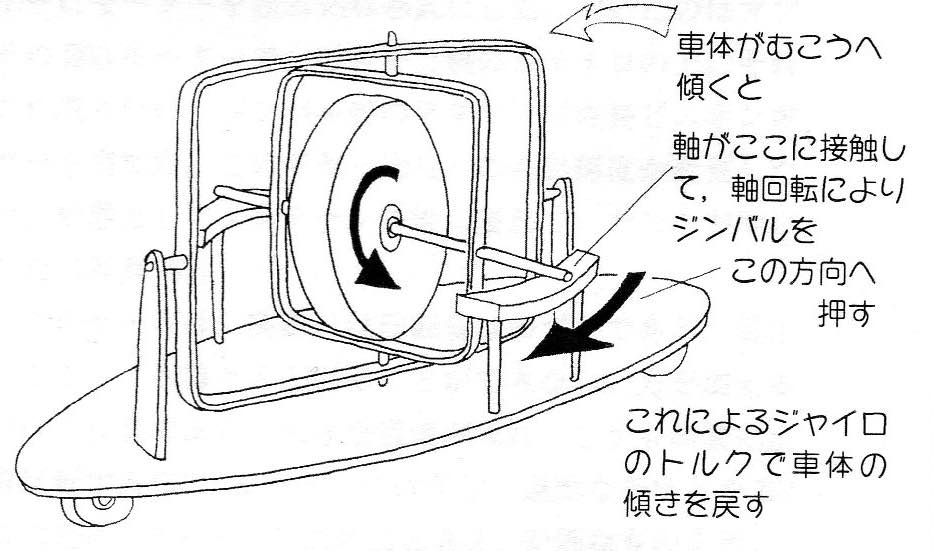
図-12 軸接触法
この方法についても、幾つか装置を試作してみた。ジンバルをコントロールすることが決定的な解決方法だとは、初めから理解していたものの、具体的にどのようにして力を加えるのかが問題だったので、この手法は良いアイデアだと考えた。だが、これもサイズの小さい模型では精度的に難しい。ジャイロ稼働の振動下にあって、適度な摩擦を得ることは不可能に近い。理論的には可能でも、現実的には微妙すぎる。Brennanも後期にはこの手法を用いていない。
(3)アクチュエータによる正帰還
ジンバルをコントロールすることが解決だと書いたが、サーボをジンバルと直接リンケージしてしまうと、ジンバルの動きを阻害する。つまり、歳差運動を自由にさせることに反し、ジャイロの効果を失ってしまう。ここが難しいところである。
Brennanのパテントに使われたという簡易図が残っているが、これによると、ジンバルのコントロールに彼は空気圧のアクチュエータを用いている(ちなみに、ドイツのScherlは油圧を採用している)。まず、ジャイロのジンバルの動きをオイル(粘性体)を介してレバーに伝え、このレバーが空気バルブをスイッチングする機構である。配管を辿ってみると、ジンバルが動く方向にさらに空気圧で押すように設定されているのがわかる。ジンバルが逆向きに動き始めると弁が切り替わり、たちまち空気圧を抜くので、歳差運動の邪魔をしない。
この仕組みを小さな模型で実現することは難しいと考え、最初は別の方法を模索していたのだが、いよいよ手詰まりになったため、正攻法を再考することにした。もう一度理論に戻り、運動方程式を最初からトレースしたところ、やはり「正の帰還」が最も効率が良いことがわかったからである。
前述の重力やバネを使った手法は、ジンバルの位置で力を作用させたために初期設定が困難になった。理論式が示すとおり、「位置」ではなく「速度」によって作用する力、しかも動きと同じ方向の力(負の摩擦)を用いる必要がある。Brennanが採用していた粘性体によって動くレバーの意味は、この「速度感知」にあった。ジンバルがどの位置にあっても、どちらへ動いているかでスイッチを切り換えるのである。これによってサーボモータで加える力の方向を決める。しかも、そのサーボモータは、普段はジンバルの動きを邪魔してはならない。ジンバルが押し返してきたとき(速度が正負反転したとき)には、瞬時に無抵抗になる必要がある。もしジンバルの動きを邪魔する(摩擦のように抵抗する)と、ジンバルはますますその方向へ傾こうとするので、車両はあっけなく倒れてしまう。
以上のアクチュエータ法を実現するには、主として2つの課題がある。
1つめは、サーボの機構である。最初はラジコン用のサーボを改造し、ギア数を減らして、無電のときに軽く動かせるぎりぎりのものを試作した。このサーボのレバーをジンバルとリンケージする。
2つめの課題は、ジンバルの速度によって切り替わるスイッチの機構である。ジンバルの歳差運動を邪魔しない程度にスリップしつつ摩擦で動き、電気接点を確実に接触させる仕組みが必要となる。
4. 実験
1本のレールの上を走るものができるまでに、多数の実験機を製作した。どのような実験を行ったのか、以下に簡単に述べる。
4.1 シングルジャイロ
最初は、最も単純なホイールが1つのジャイロを作った。ホイールは重い方が有利なので、値段は高いが真鍮を用いた。最初のホイールは、40mm径で重量は108gだった。これをマブチ280モータの軸に差し込み回転させる。回転中のモータを手で持って動かしてみると、ジャイロの力をおおまかに把握することができる。
モータをフレームに固定し、モータの回転軸と垂直の軸で、フレームが自由に回転できるようにする。このフレームがジンバルとなる。車両が受ける加速度に反応しないよう、ホイールやモータを含めたジンバルは、回転のピボットでモーメント的に釣り合っていなければならないので、必要ならばカウンタバランスを付ける。
取り付ける角度をいろいろ変えてみたり、ジンバルのピボットの摩擦を変えてみたり、各種の条件を変化させて実験を繰り返した。
条件が容易に変更できるように、各部がネジなどで調整可能な機構が望ましい。写真-4は、試作の2号機で、ジャイロも2つめのものである。2号機は外部電源とし、電圧を変えてジャイロの回転数の影響を調べた。これくらいシンプルな機構でも、条件が揃うと1本のバーの上に立つことができる。この自立安定性は、前述のように、車両が傾いたときにジャイロのジンバルが向きを変え、ホイールの回転軸が車両のロール軸へ近づくことで生じる反トルクに起因している(図-9)。
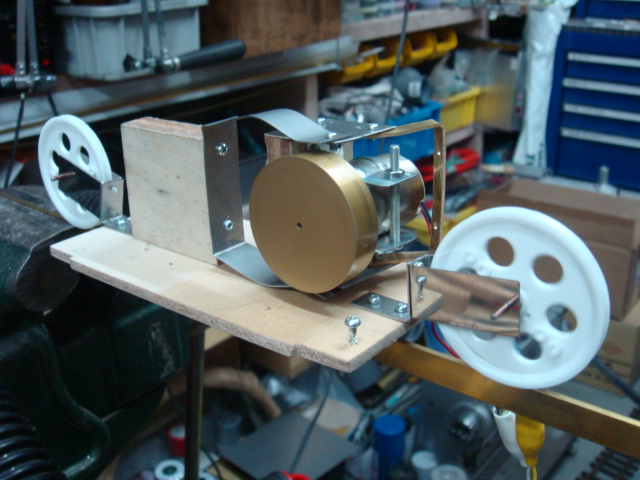
写真-4 試作2号機
この反トルクは、ジャイロが回るときの摩擦が大きいほど生じやすい(ただし、フレームではなく地面との摩擦であり、つまり空気摩擦である)。したがって、ホイールをできるだけ外部に出し、プロペラやタービンのような形状にして空気抵抗を増すほど有利となる(そのかわり回転させるエネルギィを消費するが)。初期の実験で、ホイールをフレームで覆っただけで自立ができなくなった例があったが、これは空気を介して反トルクをフレームが受け止めたためだった。
4.2 ツインジャイロ
モノレールがカーブを曲がるためには、ジャイロを2機備えて、お互いに逆回転させ、不要なトルクを打ち消し合うような機構が必要となる。このことは、ジャイロの回転軸が垂直でも水平でも同様である。
垂直軸回転のジャイロでは、車両がカーブを曲がっても影響がないように理解されそうだが、カーブを走行するジャイロモノレールは、飛行機のようにカーブの内側へ傾く。したがって、水平カーブのヨー軸回転に加えて、車両はピッチ軸にも回転していることになる。これはちょうど、飛行機が水平旋回するときに機体を傾けエレベータ(昇降舵)をアップにすることに類似している。
2つのホイールが逆回転していれば、車両のローリングに対して、それぞれのジンバルは鏡に映ったように対称の動きをする。ローリング以外(ヨー軸やピッチ軸)の回転では、ジンバルの動きは同じ向きになるので、これを強制的に防ぎトルクを打ち消す。すなわち、機械的なリンケージによって対称の動きのみを許す機構とする。
最初の試作では、ロッドで両ジンバルどうしを結んだ(パンタグラフの前後の角度同調と同じリンケージである)。ロッドは直線なので、両回転角度は厳密には同一にならないが、機構的に簡単なのでこの方法を採用した(図-13)。
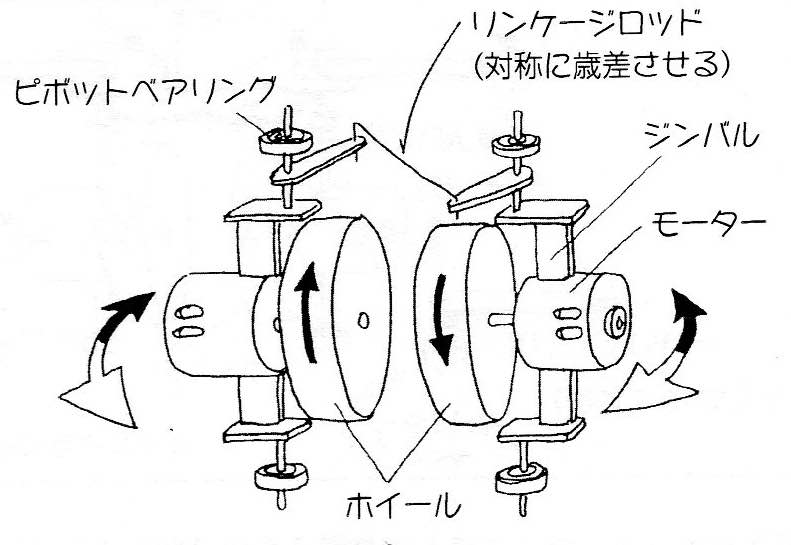
図-13 ツインジャイロのリンケージ
ジャイロを実際に作ってみると、ホイールの精度もあるが、回転しているうえに横力を受けるため、少なからず振動が出る。フレーム、ピボット、リンケージロッドなどが振動で踊らないようにするのに苦労した。
ホイール径40mmで280モータを2機用いたツインジャイロは、3号機から6号機までに搭載した。車両を作り替えた理由は、主にバランシングシステムの実験のためだった。6号機で初めてサーボによるジンバルコントロールを採用し、これが大成功だった。振り返ると、この成功が今回の開発では最も大きなステップだったと思われる(写真-5)。
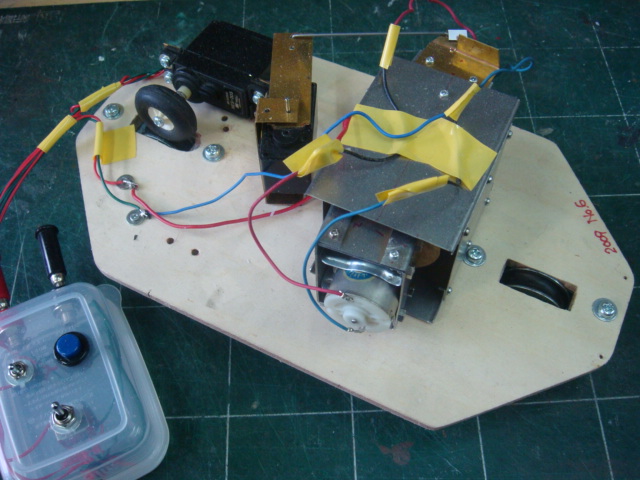
写真-5 試作6号機
電池を搭載した自立系の車両にするためには、もっと力のあるジャイロが必要となり、50mm径で168gのホイールを7.2V仕様の380モータで回すツインジャイロを製作した。このジャイロは、途中でホイールを54mm径で236gのものに交換したが、380モータの軸受けがたちまち摩耗してしまった。このため、若干ホイールを軽くし(54mm径208g)、より大きな540モータと交換して現在に至っている。
ホイールの重さは2つで416gになる。Brennanの推定によれば、ジャイロのホイール重量は、車重の3~5%が必要とされているので、今回のジャイロであれば、8kg程度の車両まで可能ということになる。ただ、実験を行った感触では、これはかなり理想的な条件であり、通常はこの半分程度が安全な範囲と考え、以後は、ホイール重量の10倍程度までの車重を想定して設計を行うことにした。ジャイロのホイールの必要条件については後述する。
4.3 バランシングシステム
バランシングシステムは、各種の方法を試みた結果、モータを用いてジンバルに直接回転力を加える方法に行き着いた。ラジコン用サーボの回路を取り外し、内部のギアを2枚取り去り、新たなレバーを取り付ける。つまり、ギア比を下げて使用する。これは、無電時にレバーを動かした場合の抵抗を感触で確かめて決定したものである。最初のバランシングシステムは、これを用いて実験に成功した。
ジンバルの歳差を減衰させるためのサーボの力は、理論的に求めることができる。しかし、こういった計算を行うには各種設定値が必要であり、そのためには精密な測定が不可欠となる。これは趣味の範囲では現実的ではない。より簡単な方法は、ジャイロをまず製作し、これを傾けたときのジンバルの動きを手で止めたり、あるいは逆に、ジンバルに手で力を加えたときの反応を確かめたりすることである。どの程度のトルクがあり、どのくらい力を加えれば反応するかを手の感覚で掴み、それに応じてモータのギア比を設定するという原始的な手法である。しかし、慣れてくるとこれが最も早く最適な設定に行き着く。
ジンバルとサーボのレバーは、当初ロッドでリンケージしていたが、より正確な同調を求めてツインジャイロの両ジンバルのリンケージをロッドからギアに変更したとき、サーボのリンケージもロッドを取り去って、ギアにモータを組み込む形式にした。用いたのはマブチの260モータで、これを2機のジャイロの上にそれぞれ取り付け、ジンバル軸の平ギアに直接ピニオンギアを当てた。このギア比も、のちに何度か変更したが、形態としてメンテナンス性に優れていたことが幸いした(写真-6)。
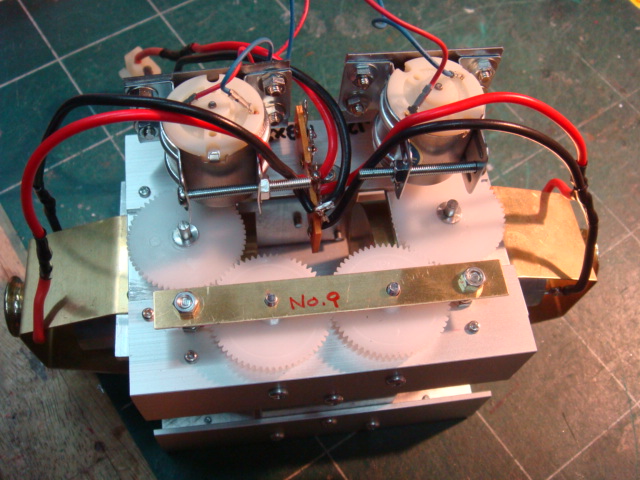
写真-6 試作9号機のジャイロユニット
このサーボは、実際には回転量はわずかである。電圧がかかってもほとんど回ることができない。力を加えるだけの役目である。大きな電流が流れ、しかも頻繁に正負反転するので、モータには非常に過酷な条件となる。このため、モータを消耗品と考え、安価なものを用い、取り替えが簡単な機構とした。ちなみに、ジャイロのモータを大きくしたとき、このサーボも260から280に変更している。
4.4 自動バランシングスイッチ
自動的にバランスを取る仕組みは、ジャイロのジンバルの動きでスイッチを切り換えることで実現する。このスイッチは、滑るレバーによって作動する。適度に摩擦が利いており、しかも接点に当たったのちはジンバルの動きを阻害しない程度の滑らかさが求められ、この調整には気を遣った。
最終的には、Oリングの弾力でワッシャを押さえつけ、金属面の摩擦で回転を伝達する方法を採用した(図-14)。いろいろ試した結果、この方法がメンテナンス性が良好で、最も長く同じ状態を維持できたからである。
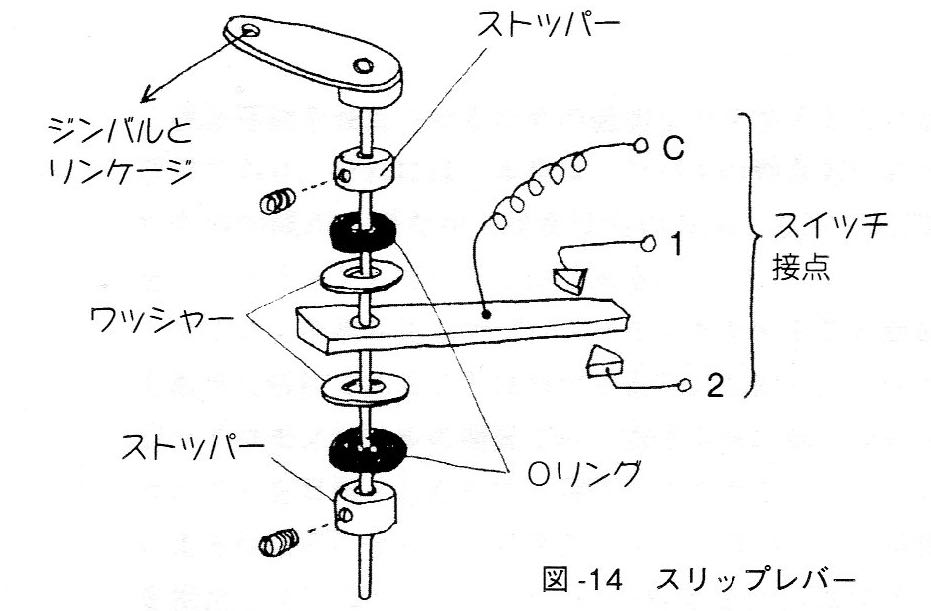
図-14 スリップレバー
滑るレバーは1接点を切り換えるだけで、つまり3Pスイッチである。接点数を増やすと調整が難しくなるので単接点とした。これだけでは回路を切り換えるには不足なので、5Vで作動する2接点切り換え(6P)の小型リレーを2機用いた。サーボの正転・逆転を切り換えるほか、片方のリレーがONのときには、もう一方がONにならないようにしている。これは、調整中にレバーと両接点が接近しすぎたときのショートを防ぐためである。ジャイロの振動もあるため、この安全回路がなかったときには、頻繁にトラブル(電池の加熱や液漏れなど)が起こっていた。
さらに、ジンバルがセンタ付近にあるときには作動しないが、両端へ近づきすぎたとき、戻る方向のサーボ制御だけを行うようなリミットスイッチも別に設けている。これらも含め、全体の回路(図-15)および機構(図-16)を示す。
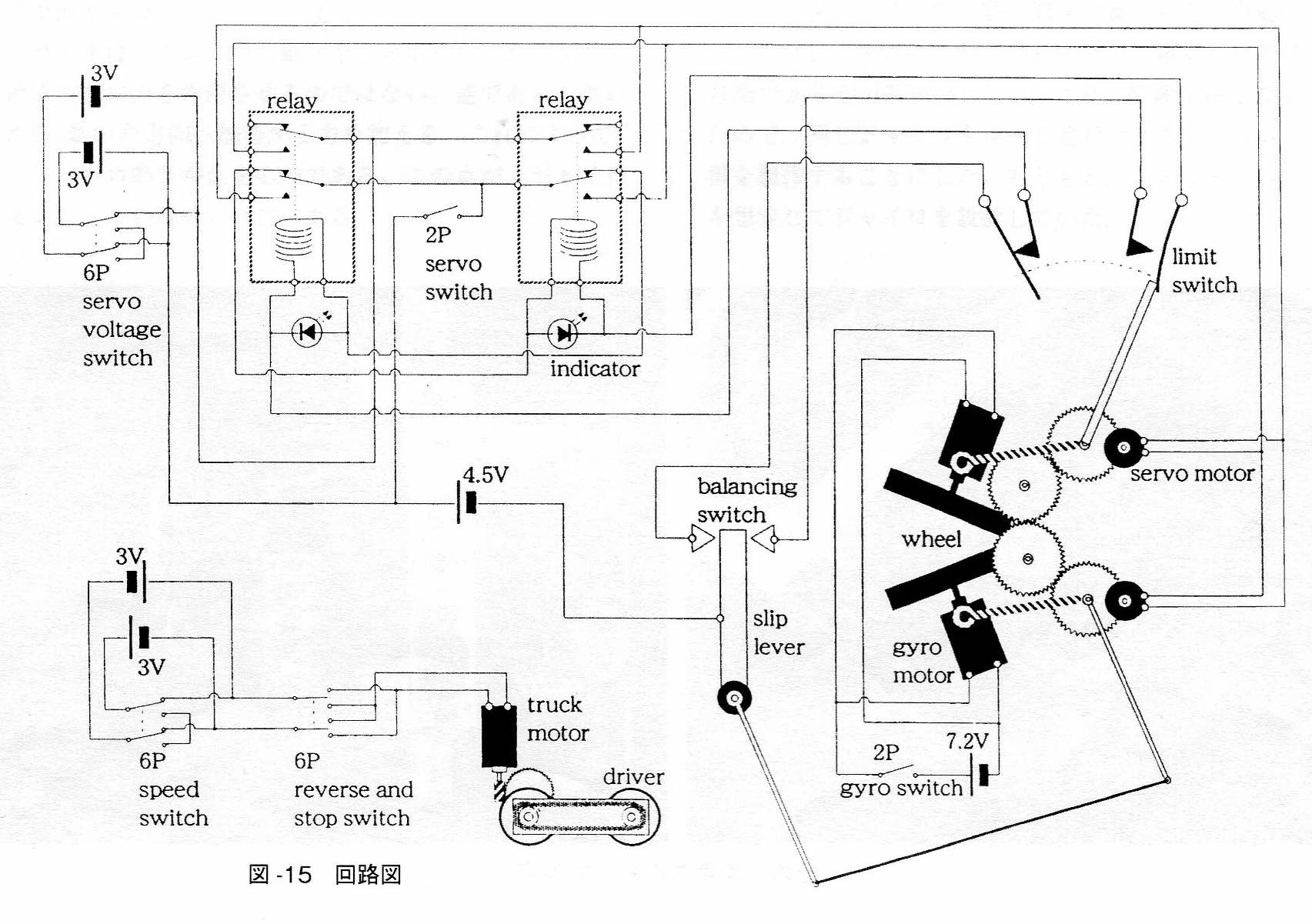
図-15 回路図
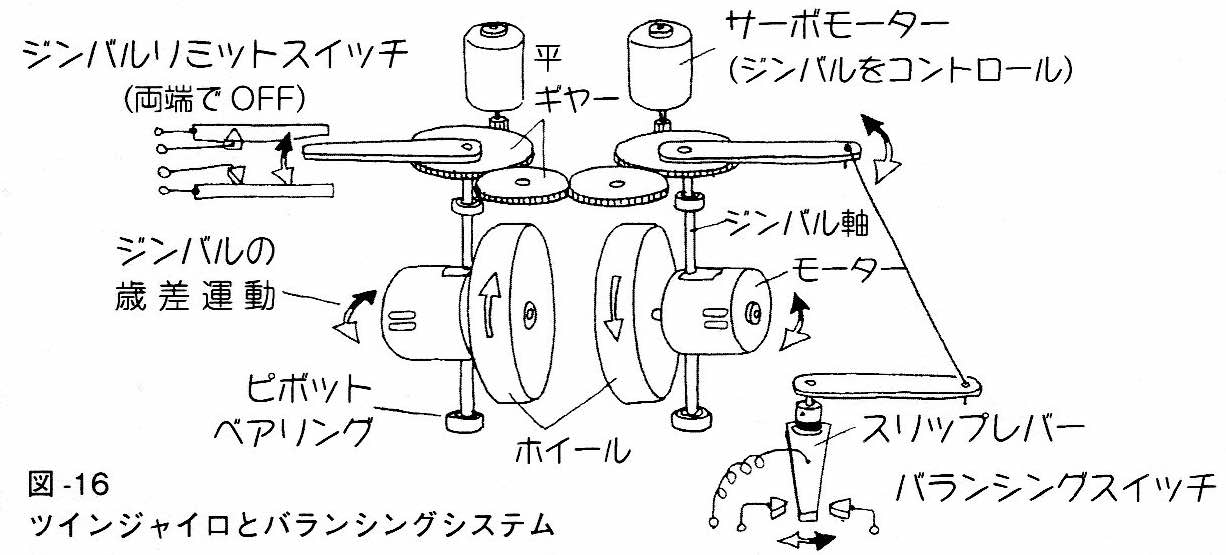
図-16 ツインジャイロとバランシングシステム
5. 設計条件と調整
5.1ジャイロ
まず、ジャイロのホイールのサイズが問題になる。モータのパワーとの兼ね合いになるが、実験で良好だったのは、表-1に示した組合せである。いずれも、ツインジャイロとするため、できるかぎり同条件のものを2機用意する必要がある。モータにホイールを取り付け、回転計や電流計で測定してチェックする。数%の違いであれば、問題はないが、10%も違う場合には、原因を見つけて取り除くか、あるいはホイールやモータを交換した方が良い。このアンバランスは、モノレールがエンドレスを周回すると、ジンバルのズレとして蓄積し、早期の転倒を招く。
表-1 ホイールとモータの組合せ
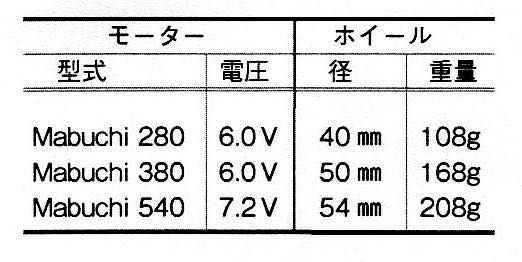
ホイールは旋盤を用いて削り出したものを使用した。大きさや重量を測って、2つのホイールが同サイズであることを確認する。もちろん、モータに取り付けて回転させ、振動ができるだけ出ないものが好ましい。
ジンバルが固定された条件で滑らかに回転するホイールでも、実際にはジンバルは揺動を繰り返すので、ホイールを支える軸に大きな力が加わる。モータにホイールを直接取り付ける場合には、モータの軸受けに負担がかかる。さきに示した組合せ条件は、主としてモータの軸受けの強度的な限界といっても良い。
もし、ホイール自体を単独で支持できれば、もっと小さなモータが使用可能となる。ただ、ホイールとモータは同じ方向に回転している方が望ましい。モータ内のコイル部もホイールの一部だからである。ギアを使って逆回転になると、その分マイナスとなる。また、ジンバルが回転できる機構が必要なため、モータ後部が突き出ているとフレームとの関係で邪魔になる。ホイール内部にモータが入った形態(ホイールインモータ)が理想的であるが、筆者はまだ試していない。
ちなみに、現在はバッテリィに2機のモータを並列でつないでいる。片方のモータが不調になり回転が落ちると、そちらに電流が集中してしまう。これも、検討課題の1つといえる。
ジャイロのホイールや回転の必要条件は、理論的に導かれている。ただし、仮の数値が入力されているため完全ではなく、大まかな目安と考えてもらいたい(本稿には数式を用いないつもりだったが、これだけは参考になると考えて記す)。
M(rω)2>20Wh
ここに、Mはホイールの質量(kg)、rはホイールの半径(m)、ωは回転速度(rad/sec)、Wは車両の重量(N)、hは車両の重心高さ(m)である。
つまり、車重と重心高さに対してホイールの重さは1乗でしか利かないが、ホイール半径と回転速度(すなわち周速)は2乗で利く。重さよりも径を大きくし、回転数を増すことが有利となる。
当然ながら、車重が同じならば重心が低い方が有利である。また、同じ重心高さでも、重量物が回転中心に近い配置になっている方がコントロールが楽になる。
5.2 ジンバルコントロール
ジンバルに力を加えるサーボの設定が、ジャイロモノレールの成功のキーポイントといっても過言ではない。条件として重要なのは、第1に、無電時に抵抗なくジンバルが動くこと、第2に、サーボの力の大小、そして第3に、サーボの反応速度である。
サーボの力は、前述のように試行錯誤で見つけることが手っ取り早い。弱くても強くてもうまくいかない。弱いとジンバルの歳差運動を止められず、すぐに倒れてしまう。強すぎると、今度は反発が強くなり、揺動が激しくなる。
適切な力は、当然ながらジャイロの力に依存しているから、たとえばバッテリィの消耗などでジャイロの回転が落ちると、相対的にサーボは強めの設定になってしまう。悩ましいところである。
歳差運動を減衰させるための適切な力を加えることが理想であり、それには、本来はジンバルの動き方に応じた力の加減が必要だが、現在は力の方向とON/OFFをスイッチングしているだけである。
マイコンを組み込んでプログラミングをすることが最も簡単な解決であることは自明である。しかし、今回のジャイロモノレールの開発では、電子回路に頼らないメカニズムを目標としたので、現在のようなローテクともいえる仕組みになった(発光ダイオード以外には半導体を使用していない)。なにしろ、100年まえにはマイコンもセンサもなかった。それでも、立派に実用性のある「機械」を作り上げる技術が存在したのである。これに対する敬意というわけでもないが、エレクトロニクスなどの新技術を排除した工作を楽しみたかった。何故なら、そちらの方が筆者が不得意な分野だったからだ。
さて、ジンバルとサーボのリンケージの遊びもできるだけ小さい方が良い。遊びがあるとサーボの対応が時間的に遅れ、余分なトルクを必要とするだけでなく、車両の揺動幅が大きくなる。
一例だが、小さなモータでギア比の高いサーボにすると、ギア部の遊びが大きくなり、また無電時の機械抵抗も大きくなってしまう。大きなモータ(あるいは複数のモータ)でギアを少なくする方が良いが、この場合は電力が必要になる。試行錯誤で折り合いをつけることになるだろう。
最後に、繰り返しになるが、ジャイロモノレールの技術で最重要なことをもう一度記す。
サーボは、ジンバルの動きを止めるためにあるが、止める方向に力を作用させるのではない。逆である。動いたら、動いた方向へ加勢する力を加える。これによって、ジンバルの動きが止まるのである。この点が、ジャイロモノレールの技術のコアである。
余談だが、「工学的なセンス」ではありえないような設定が、ジャイロモノレールを成功させる。ジャイロのモータだけを止め、ジンバルを手で動かしてみると、バランシングシステムが作動し、左右にばたばたと踊る。途中で止めることができない。この「不安定さ」がジャイロには不可欠なのである。
この理屈は、コマが倒れる力によって立ち続けることと同じである。倒れやすく設定することが、倒れない秘訣なのである。
5.3 実験9号機の最終仕様
リモコンタイプであったものの初めて1本のレールの上を走ったのが6号機(写真-5)だった。その後は、バッテリィをすべて搭載した自立系のモデルを目指し、そのための重量増に備えて大きなジャイロを製作しつつ、バランシングシステムの実験・開発に集中した。自動バランシングシステムによって初めて完全に自立したのは8号機であるが(写真-7)、これは走行装置を持たなかったので、同じジャイロを用いて走行テストができる9号機を製作することにした。もともと、このサイズの車両を想定してジャイロを設計していた。
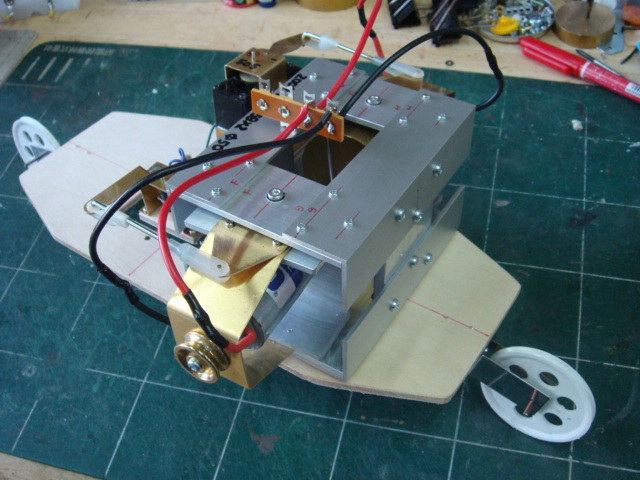
写真-7 試作8号機
製作途中でジャイロのモータもホイールも交換した。また、サーボのモータも交換し、ギア比も変えている。9号機の主な仕様を表-2に示す。最新のジャイロは、サーボもバランシングスイッチも一体に組み込んだ形になっている(写真-8)。
表-2 試作9号機のスペック
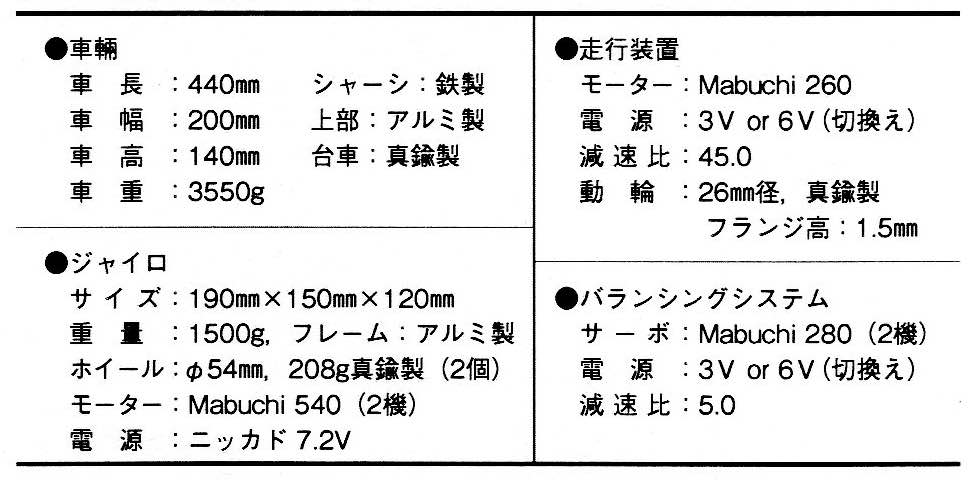
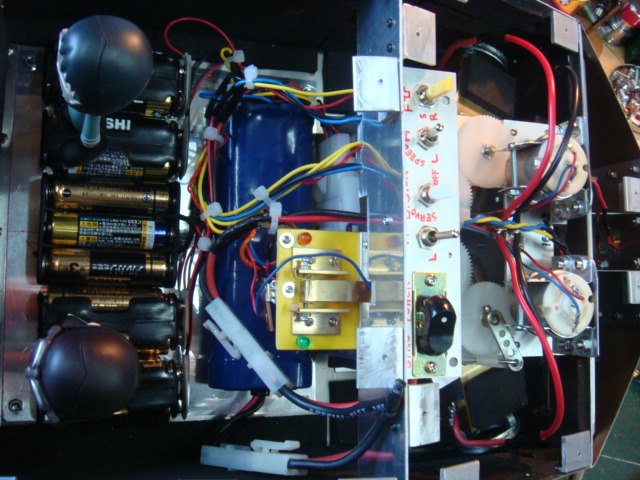
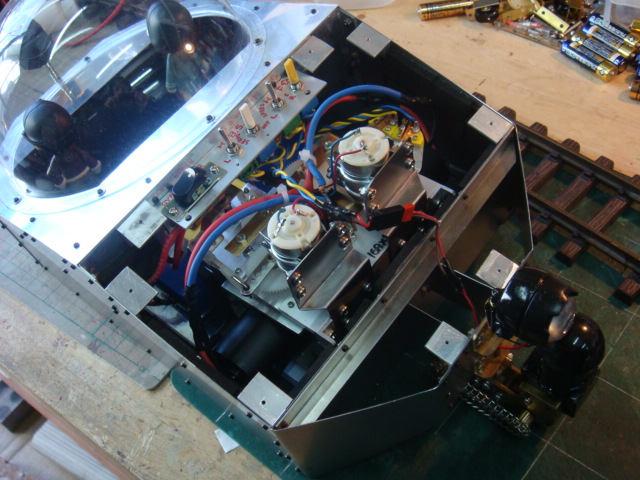
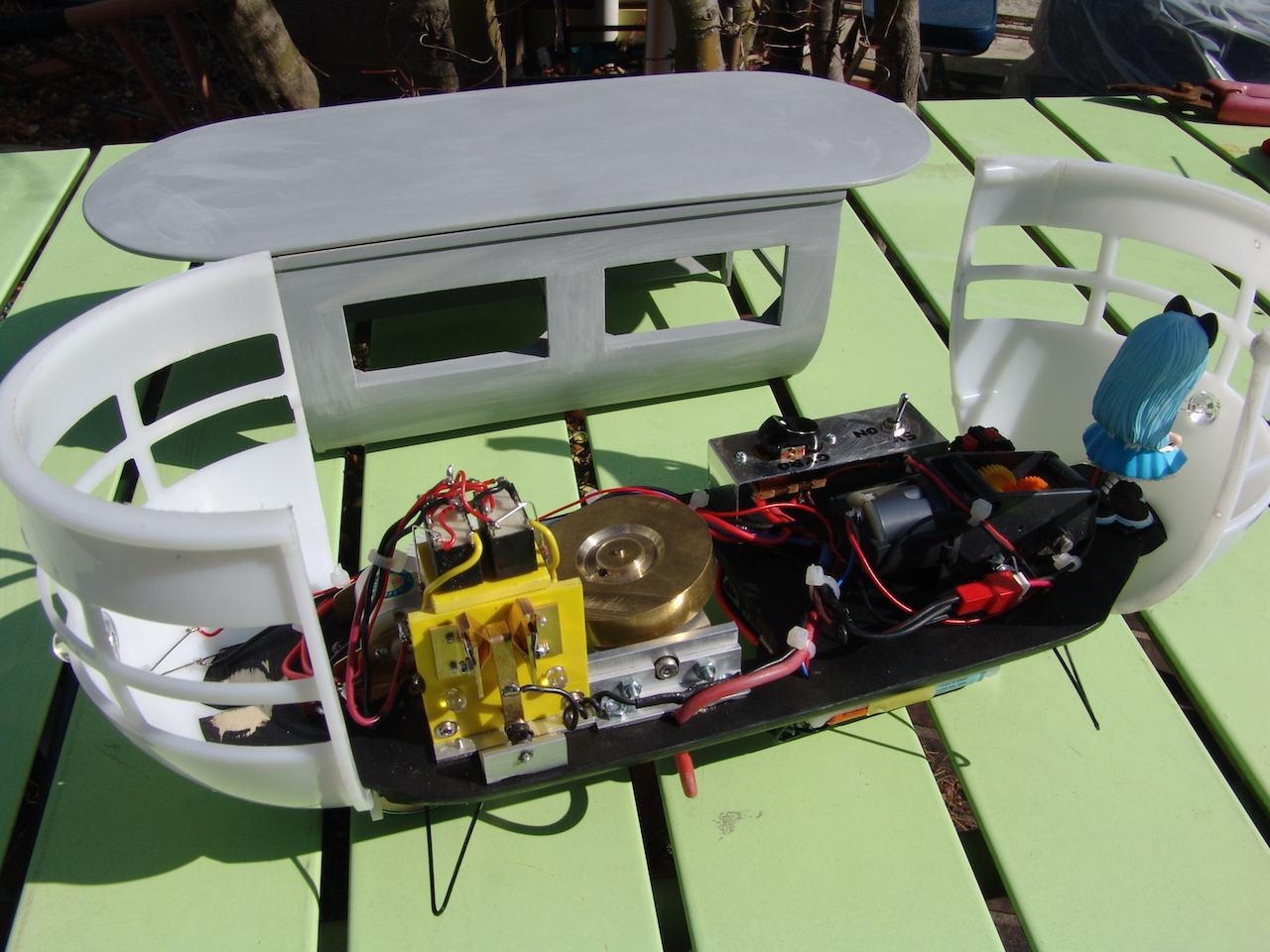
写真-8 試作9号機の内部
改造やテストを繰り返すうちに、少しずつ自立できる時間も長くなり、最終的にはエンドレスのコースを何周も走れるようになった。調整がうまくいったときには、たとえば、左右の片方に突然荷物を載せても倒れない。重くなった方を自動的に持ち上げて傾きバランスを取る。遠心力や横風に対しても、自然に力が来る方向へ傾く様は、まるで生き物のようである。
ボディは未完成だったが、この9号機の走行シーンの動画をインターネットにアップしたところ、最初の10日で世界中から1万件を超えるアクセスがあった。ジャイロモノレールの動画は、それまでネット上に存在しなかったのである。数百通ものメールが殺到し、返答用の文例を数種類用意して対応に追われた。ジャイロモノレールについては、少なくとも国内よりは海外で関心が高いようである。
現在は、次の10号機に搭載する予定の、より大型のジャイロを設計している。現有の最新のジャイロは、9号機に搭載したまま残ることになった。同様に6号機も残っている。これ以外の実験機は、部品を次のモデルに流用しているため残っていない。
9号機は、初めてジャイロモノレールとしての機能を実現したモデルとなったので、ボディを製作してやることにした。この車両のシャーシや台車部は、Brennanの模型をデザイン源としている。ヘッドライト(市販の小型懐中電灯を利用)や走行モータなどの取り付け方も似ている。ジャイロのある側を前にしてキャビンを作り、トラックのように後部は荷台にする予定だったが、それではBrennanモデルにあまりにも似すぎるし(模型としては相応しいのかもしれないが)、どうデザインしてもモータボートのようになりそうだった。そこで、子供の頃によくおもちゃ屋で見かけた(見るだけで買ってはもらえなかった)宇宙船をイメージしてデザインし直した。現在は未塗装だがほぼ完成した状態であり、暖かくなった頃に塗る予定である(写真-8,9,10)。
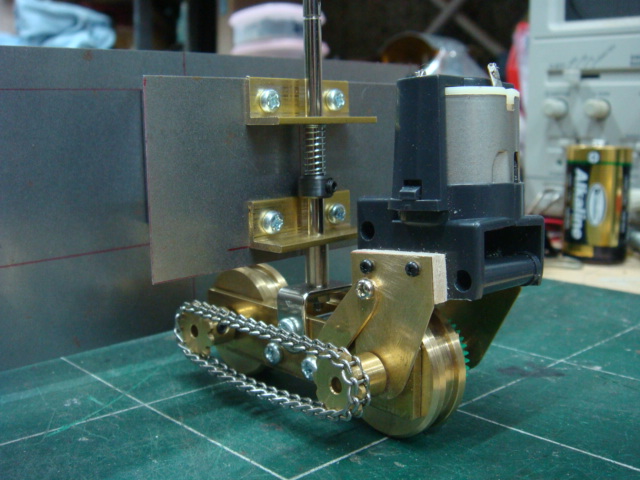
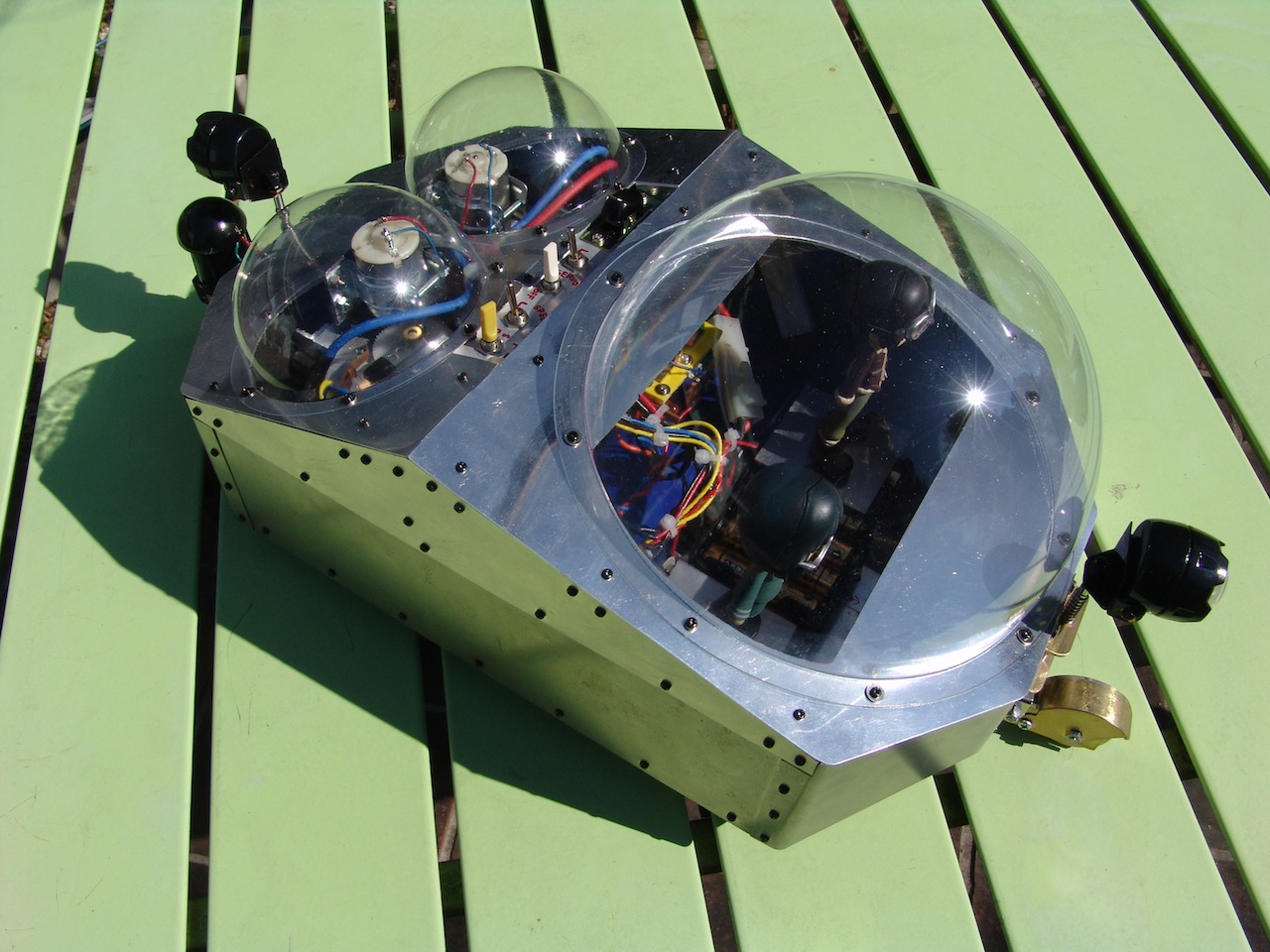
写真-9 試作9号機の台車部 写真-10 試作9号機のボディ
なお、庭で走らせるときに近所迷惑にならないよう、シャーシの内側にスポンジを貼り詰めて防音処置をしたことを最後に付記しておく。アメリカからのメールで、「髭剃り器か?」「こいつが走ったところは滑らかになるのでは?」というものが複数届いたからである。これに洒落て、ジェット戦闘機の「Saber」ならぬ「Shaver」と命名することにした。
6. 今後の課題
課題は山積みである。以下に主なものを挙げる。
1)モータやバッテリィの選定。できれば条件が維持できるブラシレスモータを使ってみたい。また、バッテリィも最近は高性能のものがあるので、これらも試してみる価値がある。
2)ツインジャイロの構造的な洗練。ギアのリンケージを含めて、より合理的な構造を目指してデザインしたい。
3)バランシングシステムの最適化。サーボモータのトルクの調整。あるいはスイッチングを無段階に行うような工夫。いつまでも意地を張らず、マイコンを使った制御を採用すべきだろうか。
4)人が乗って運転ができるサイズの車両を作りたい。おそらく筆者が乗り込めば、人間がサーボの役目を果たせるので、バランシングシステムは不要となるものと想像している。この運転はきっとエキサイティングだろう。
試作9号機の走行シーン
7.あとがき
先日(1月のこと)、星野公男氏と井上昭雄氏がイギリスへ行かれ、ヨークの鉄道博物館にあるBrennanが作った小型のジャイロモノレールの写真をいただいた(写真-2)。今回の9号機でプロトタイプにしたもののオリジナルである。
井上氏も再度ジャイロモノレールに挑戦されるそうである。あの秀逸なデザインの赤い電車が滑らかに1本のレールの上を走ったら壮観だろう。
本稿を読んで、自分もジャイロモノレールを作ってみよう、という方がいらっしゃれば、大変嬉しい。未知のところ、難しい部分が多々あるが、1人よりも2人、2人よりも3人が挑めば、ノウハウも早く蓄積するものと期待できるし、得られた知見を広く公開し共有することこそが、「技術」あるいは「工学」というものの基本精神である。
筆者は、本誌を10歳のときから42年間欠かさず購読している。これまでに最も惹きつけられた記事は、三ツ矢明氏の特殊なライブスチーム群だった。ただレールの上を走るというだけのことに、ここまで人間は知恵を絞るものかと驚き、また、その思考の実現こそが、もの作りの素晴らしさだと感じている。
実は、20代のときにレイアウトコンテストで佳作をいただいたことがある。いつの日かもっと技術的な記事を書けるようになりたいと夢見ていたので、今回、未完の技術を拙いながらも投稿させていただいたしだいである。(2010年1月記)

本稿のあと、よりシンプルな機構を目指して再度製作した7号機(9号機より新しい)
製作方法を近々発表予定
参考文献
1) ジャイロ活用技術入門, 工業調査会.
2) 鉄道時報, 1907年6月29日号, 1907年10月5日号.
3) Luis Brennan's Mono-Rail Car, Cleveland Moffett.
4) The Brennan Gyro-Monorail.
5) Gyro monorail, Wikipedia.
6) 筆者の動画サイト.
7) 筆者の鉄道模型のサイト.
/☆Go Back☆/
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)