MORI Hiroshi's Floating Factory
Gyro Monorail Workshop
新しいジャイロモノレール試作モデル紹介
試作10号機~12号機

Experimental model No.12 in 2016
/☆Go Back☆/
試作10号機
10号機は、下の写真に示した佐藤隆一氏製作のジャイロを用いて作ったモデルであり、欠伸軽便のジャイロモノレールでは唯一の軸回転摩擦によるジンバルコントロールを行っている。この方式は、ジャイロが無振動であることが条件となり、精度の高い工作が要求される。ホイール径は55mm、ホイール重量242g、モータにはマブチの280が使用されている。ホイールは、ジンバルにボールベアリングで支持され、逆にモータは写真のように柔軟性のある支持方式となっている。ホイールは完全にバランスが取れていて、回転音は非常に静かである。

佐藤氏製作のジャイロユニット
10号機は、ツインジャイロで、垂直回転軸でタンデム配置とした。2つのジャイロは、下の写真のように、中間のアームを介し、両ジンバルとはボールリンケージで結ばれている。2つのジャイロは逆回転し、ピッチング方向に歳差を許すが、この歳差の方向が、このリンケージによって前後対称となる。
この写真は、車両の下側になる。ジャイロの回転軸の先端は、スリットに挟まれた位置にあり、このスリットが、左右に動いて回転軸に接触し、ジンバルを動かす力が生じる。また、スリットの左右の動きは、ジンバルの歳差によって動くスリップレバーとのリンケージによるものである。
サーボモータを使わず、ジャイロの回転を利用してジンバルに加力するバランシングシステムであり、この方式は、Brennanの模型でも採用されていた。また、古い科学雑誌にも、少年用の工作記事として掲載された例がある。
佐藤氏が製作されたジャイロモノレールは、シングルジャイロであるが、機構はまったく同じである。ただ、佐藤機は、モータが下でスリットが上となっている。
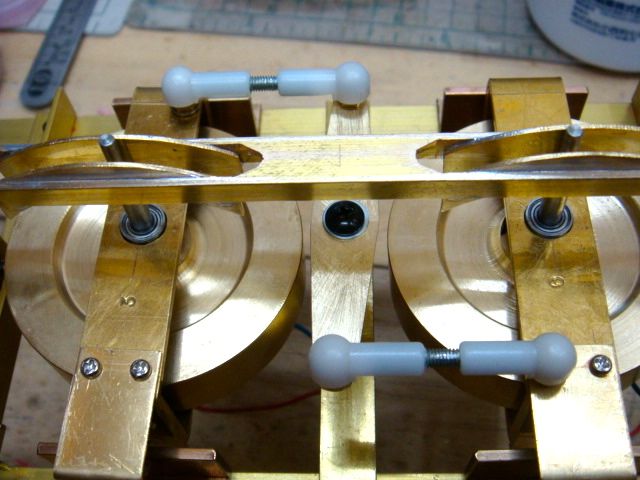
ツインジャイロのリンケージと軸摩擦スリット
シャーシや走行装置は、主に真鍮アングルを用いて製作した。走行装置は、片側の台車にのみあり、駆動は2輪である。ジャイロが省エネのため、また、サーボモータがないため、搭載する電池が少なくなる。また、シングルジャイロでは苦手な方向のカーブも、ツインジャイロでは関係なく走行できる。

試作10号機の走行試験
10号機は、総重量が1660gで、ジャイロホイール重量が2つで合計483gとなり、両者の比率は29%もあるため、非常に安定している。ただ、摩擦方式は、調整がやや難しい欠点があり、特にツインジャイロとしたため、2軸のうちの片方だけが接触していることが多く、サーボの効果が小さくなる。
ボディは、試作7号機と同じく、工事用ランプの傘(下の写真の赤い部分)を用いて製作した。その他の材料は軽量化のためバルサを用いた。
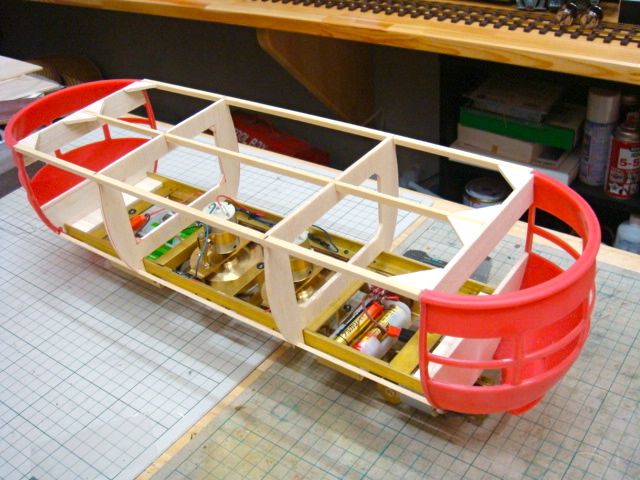
製作途中のボディを被せた試作10号機
ボディは、ウレタンで塗装した。室内でGゲージの線路の片方を使って走行するのに適している。軸回転摩擦式は、調整が完全に取れている場合、ほとんど左右に車体が触れず、非常に安定している。ただ、その状態を長く維持することが難しい。頻繁に調整が必要である。

完成した試作10号機
試作10号機の動画(ほとんど左右に揺動しない安定した走行)
試作11号機
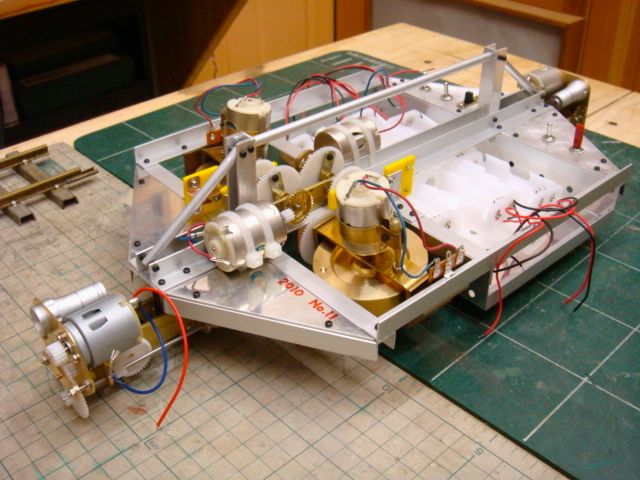
11号機は、10号機とほぼ同じスペックだが、高速走行のため低重心のデザインとした。用いたジャイロは、10号機と同じ佐藤氏製作のもの。垂直軸回転であるが、下の写真のように左右に並べ、ピッチングの歳差を対称とするためのリンケージは平ギアを用いている。フレームはアルミアングルで製作。ボディはない。
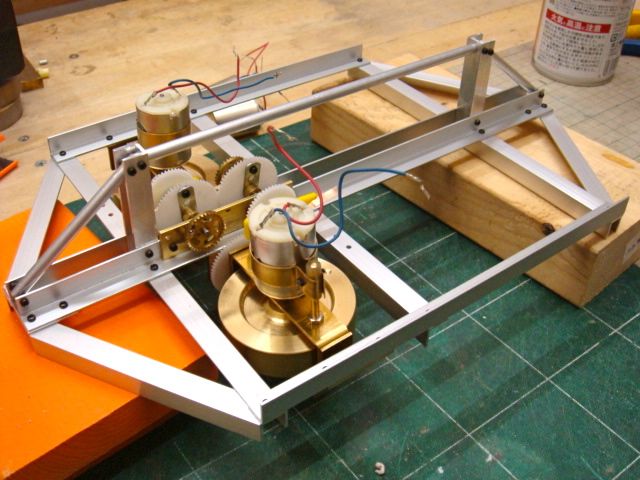
製作中の試作11号機(フレームとジンバル)
下の写真に、左右のジンバルのリンケージのギアを示す。ジンバルに取り付けられたギアを含めると、合計6枚の平ギアを用いている。さらに、クラウンギアを用いて、バランシングのサーボモータにも連動する(左右に1機ずつ搭載している)。このサーボモータは、ジャイロに用いられているものと同じくマブチ280。
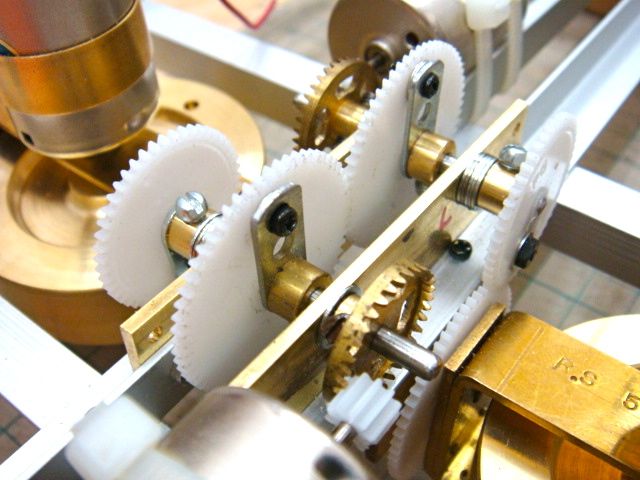
ツインジャイロのギア・リンケージ
前後の台車の全車輪(4輪)を駆動する。走行用モータはマブチ260が2機。バランシングスイッチを左右に2機備えることで、6Pスイッチと同等の作動を実現し、これによってサーボを逆転も可能となる。したがって、本機ではリレーを用いていない。電池はすべて単3で、ジャイロ用、サーボ用、走行用、それぞれに4本。合計12本を搭載している。走行用とサーボ用は、3Vと6Vの切換えができるようになっている(前者は走行速度調節、後者はサーボの効きを切り換えるため)。
ほぼ完成した試作11号機
走行速度は速く、カーブでは飛行機のように車体を傾けて走り抜ける。電池が続くかぎり自立している。非常に安定した性能を発揮した。バランシングスイッチを用いた、小型サイズのジャイロモノレールとしては、満足できるレベルに達したものと判断した。

走行中の試作11号機
試作11号機の動画(カーブの半径は約60cm)
試作11号機の動画(屋外のコースでの試験。逆方向のカーブも問題なく走行)
試作12号機
人が乗れるサイズのジャイロモノレールを作るためには、幾つか解決すべき問題がある。その1つが、大型のジャイロを製作すること、2つめが、ジンバル制御を安定して行う方法の開発である。
試作9号機までのジャイロは、ホイールをボールベアリングで支持しない(モータで支持する)簡易な構造だった。より大きなホイールには、頑丈なジンバルが必要となる。ちょうど、井上昭雄氏からいただいた鉄製のホイール(140mm径)があったので、これを用いてジャイロを製作することとした。ホイール重量は1kg以上あり、このサイズのものを高速で回転させることは、かなり危険を伴う。莫大な運動エネルギィとなるので、注意が必要である。
ボールベアリングで支持したのち、ホイールのバランスを取った。旋盤で製作されたホイールでも、バランスは取れていない。回転させて停止する位置をチェックし、重い側に穴を開けるなどする。この作業を繰り返して、回転バランスを取る。下の写真はこれを行っているところ。これだけで、比較的静かに回るようになる(といって安心はできないが)。ただ、さらに厳密にバランスを取るには、加速度計やオシロスコープを使った計測が必要となる。将来は、そういった作業が不可欠になるものと予想している。
モータは、ユニバーサルジョイントを介してホイールとつなぐ。写真のジョイントは、すぐに壊れてしまうため、のちにホイール軸径を増し、ベアリングも大きくし、カップリングのパーツも大型のものと交換した。モータは、マブチ540である。

大型のジャイロを回し、ホイールのバランスを確認しているところ
当初は、下の写真のように、ベニヤ板に、ジンバルが左右に僅かに回転できるように支持し、実験を行っていた。車体の左右の動きをこれで感知しようというアイデアだったが、やはり、ジンバルの振動があるためか上手くいかない。結局、この方式は不採用となり、ジンバルのフレームを直接ベニヤ板に固定することとなった。もちろん、ジンバルのピッチングの歳差を許す構造となっている。ちなみに、写真の時点では、モータを下にし、上部で軸回転とスリットでバランシングを行うことも検討していた(回転軸が長く上方へ延びているのはそのため)。やはり、少しでも振動がある条件では、摩擦式は不安定であり、特に大型の場合はトルクが大きくなるため、構造的に難しいことが判明した。

ジンバルのフレームのローリングを僅かに許した構造で実験
結局、まったく違ったバランシングシステムを採用することになった。それは、ラジコン用の製品であるサーボを用い、これとジンバルを直結する。ジンバルの回転は、ポテンションメータによって感知する。そのデータをマイコンで処理し、サーボを動かす、というシステムである。やはり、大型のモデルでは、信頼性のあるシステムでなければならない。頻繁に調整が必要になったり、ちょっとした振動で条件が違ってしまうようでは困る(大きいと事故になる)。そこで、構造をできるかぎりシンプルにし、コンピュータのプログラムによって制御することで、常に同条件となる制御システムを構築する方針とした。これまで、電子的なコントロールを採用しない方針を貫いてきたが、実機を目指すためには、この妥協は避けられないものと思われる。
実験に使っていたベニヤ板が、そのままシャーシとなった。ジャイロのジンバルは左右のL型鋼材にベアリングで支持されている。ピッチングするジンバルは、サーボモータとロッドで直結している。ジンバルの回転を感知するポテンションメータは、サーボに使われているもの(小さなボリューム)を利用した。
ポテンションメータでジンバルの動きを感知し、これに追従するようにサーボを動かせば、抵抗しないサーボモータとなる。ここがこのシステムのキーポイントである。これによって、スリップするバランシングスイッチが不要となり、調整箇所は、プログラムの数値のみとなる。ジンバルの速度に対して、またジンバルの位置(傾き)に対して、所定の力を所定の方向へ適時加えることができる。どのような設定も、パラメータを変えるだけで実現でき、一度設定した条件が維持されるので、実験の再現性も高い。
マイコンは、ラズベリィパイ(イギリス製のオンボードコンピュータ)を使用。走行装置は、ベニヤ板の下にあるが、後輪のみを駆動。ラジコンで速度がコントロールできる。

試作12号機の最終的な形態(マイコンによる制御を採用)
試作12号機の製作を始めたのは2014年の夏、初走行したのは2015年の春である。その後、実験や走行を繰り返し、2016年の9月になって、ようやく完成と判断し、ボディを作った。また、左右に引込み脚を装備し、停車時にタイヤを左右に出すようにした(このとき、同時にバランシングシステムを停止させる)。これは、より大型のモデルに不可欠な機能と考え、試作したものである。
5インチゲージの車両のサイズで、全備重量は5.3kgである。パラメータを変えて挙動を観察する実験は、今(2016年10月)も続いている。

ボール紙製のボディを被せて完成した試作12号機
試作12号機のバランシング試験の様子
試作12号機の走行シーン(引込み脚を上げ下げを行っている)
試作1号機~9号機のページへ戻る
/☆Go Back☆/
)
)
)
)
)
)
)
)
)
)
)
)
)
)