MORI Hiroshi's Floating Factory
Gyro Monorail Workshop
ジャイロモノレール資料館(2号館)

Brennan's gyro monorail model in 1908.
★ジャイロモノレール関連の資料を集めました。未整理の状態です。少しずつ加筆していくつもりです。
★誤字や間違った記述を発見された場合は、メールでお知らせ下さい(アドレスはトップページにあります)。
/1号館へ/
/3号館へ/
/4号館へ/
/5号館へ/
/☆Go Back☆/
この文章は、2009年当時ネットのWikipediaにあった説明を訳した(一部意訳あるいは補足した)ものである。現在は、当時とは文章が違っている(だいぶ短くなった)ので、このとおりではない(特に後半の数学的解析の部分が今はなくなっているようだ)。
Gyro monorail
gyro monorail, gyroscopic monorail, gyro-stabilized monorail, gyro carなどは、すべて1本のレールの上を走る陸上交通を意味する。鉄道以外にも自動車がある。ディスクを回転させたジャイロを利用し、歳差運動(precession)を起こし、逆振り子の不安定さに打ち勝って、1本のレールの上でバランスを取る。
このモノレールは、Louis Brennan, August Scherl, Pyotr Shilovskyらによって生み出され、彼らはそれぞれフルサイズのプロトタイプを20世紀初頭に製作している。改善されたバージョンは、アメリカのErnest F. Swinney, Harry Ferreira, Louis E. Swinneyらによって1962年に開発された。このシステムはGyro-Dynamics monorailと呼ばれている。ジャイロモノレールは、プロトタイプの段階からは進展していない。
モノレールの主なアドバンテージは、Shiloviskyが述べているように、通常の鉄道が高速化の限界で直面しているhunting oscillation(揺動あるいは蛇行)の問題を抑制することや、たとえばTGVなどの高速列車ではカーブの半径は7kmにもなるが、これを回避することができる。何故なら、モノレールはカーブでは飛行機のように自動的にバンク角を取るからだ。こうなると、車上では遠心力を感じない。
主な欠点は、すべての車両、つまり機関車以外の客車や貨車にも、自立するためのジャイロが必要であり、一定の動力を要することである。
重心位置を横方向に移動させたり、車軸反応(反トルク)を利用したバランス保持の手法があるが、それがなくてもジャイロは静的に安定している。だから、制御システムは動的安定性に関してのみ受け持てば良い。したがって、ジャイロのバランス機構は、正確にはロール・ダンパと位置づけることができる。
歴史的背景
Brennanのモノレール
ページトップにある写真は、Louis Philip Brennanが開発した22tonのプロトタイプである。Brennanは、1903年に最初のモノレールのパテントを申請している。
彼の最初のデモンストレーション・モデルは、75cm×30cmの箱に入ったバランスシステム(姿勢制御装置)だけだった。軍事審議会に、フルサイズの車両の製作には1万ポンドの開発費が必要だと申請した。財務省もこれに投票したが、Brennanは軍から2000ポンドをもらって仕事をした。
この予算内で、Brennanは少し大きな模型を製作した。それは、車長1.83m、車幅46cmのもので、2機の5インチ径ジャイロによってバランスを保った。この模型は、現在もロンドンの科学博物館に残っている(今はヨークの鉄道博物館)。この車両のための線路は、KentのGillinghamにある彼の自宅の庭に敷かれた。線路は、木製の枕木の上に通常のガスパイプをのせたものや、50フィートのワイヤロープの橋などで構成されたコースで、急カーブや1/5勾配も含まれていた。
Brennanの縮小模型鉄道は、軍のトップに大いに支持された。しかしながら、1906年に政権を取った自由党政府は予算削減の方針を掲げていたため、軍からの出資が実質的にはストップしてしまった。だが、1907年には、北西部開発のためにモノレールに注目していたインド会社が6000ポンドを出資し、さらに1908年には、KashmirのDurbarによっても5000ポンドが出資された。この資金は1909年の1月には消費されたため、インド会社がさらに2000ポンドを追加した。
1909年10月15日に、レールカーは初走行をした。工場内で32人を乗せて、初めて自走したのである。この車両は、車長12.2m、車幅3mで、20馬力(15kw)のガソリンエンジンを搭載していた。スピードは35km/hである。走行用のトランスミッションは電動で、ガソリンエンジンは発電機を駆動する。モータは両端のボギィ台車にある。発電機はまた、ジャイロのモータにも給電し、さらにエアコンプレッサも動かした。これは、空気圧で作動するサーボを使ったバランシング・システムだったためであり、Brennanの初期の模型などにあった回転軸摩擦を利用したシステムではなかった。
ジャイロはキャブ内に搭載され、公開以前のディスプレイのように床下にジャイロを収納したプランではなかった。これは、1909年11月10日にドイツのScherlのマシンが公開されるという情報を知ったため、それよりも早く、世界初のデビューができるように発表を急ぎ、ジャイロの位置を変更する時間がなかったからだった。
Brennanのモノレールの一般へのデビューは、1910年にロンドンのWhite Cityで開催された日本イギリス博覧会だった。このときモノレールは、円形の路線を50人を乗せて20km/hで走った。乗客の中にはウィンストン・チャーチルもいた。彼はモノレールにかなり熱心だったが、さらなる出資を引き出すには、残念ながら、一般交通としての実用性に乏しかった。2台製造された車両のうち1機はスクラップになり、もう1機は遊園地のシャトルカーとして、1930年まで使われた。
Scherlの車両
Brennanが彼のモノレールのテストを終えたちょうどその頃、ドイツの新聞社の経営者であり慈善家のAugust Scherlが、彼の開発したジャイロモノレールの公開デモンストレーションを行うと発表した。このデモンストレーションはベルリンのZoologicalガーデンで1909年11月10日に実施された。
Scherlのマシンもまたフルサイズの車両で、Brennanのものよりもいくらか小さく、車長5.2mだった。ペアの横方向ベンチに4人を乗せることができる。2機のジャイロは、そのベンチの下にあり、垂直軸回転のものだった。Brennanは水平軸回転のジャイロを使っているので、ここが異なっている点である。
実際のところは、Scherlは資金提供をしたにすぎない。メカニズムは、Paul Frohlichが開発し、車両は、Emil Falckeが設計したものだった。
デモンストレーションの間、モノレールは完全に機能し、評判はまずまずだったものの、重要な出資元は見つからず、Scherl自身も投資をするのをやめてしまった。
Shilovskyの業績
BrennanやScherlが開発に必要な出資を得ることに失敗したあと、実質的な開発は、1910年以降、Pyotr Shilovskyによって続けられた。彼はロシア人の貴族で、ロンドンに住んでいた。
彼のバランシング・システムは、原理的にはBrennanやScherlのものと違いはないが、よりコンパクトでより低速回転のジャイロを使っている。レールカーではなく、彼はジャイロカーを設計した。これは、1913年にロンドンの道路でテストされ、Wolseley Motor社が製造したものだった。この車には、BrennanやScherlが採用していた反転ツインジャイロではなく、シングルジャイロが使われていたので、非対称の挙動を示し、左方向への急カーブを切ると不安定になった。このジャイロカーは注目を集めたが、資金は得られなかった。
第一次大戦後の開発
1922年、ソビエト政府は、レニングラードとTsarskoye Seloの間に、Shilovskyのモノレールを通す工事を始めた。しかし、プロジェクトが始まってまもなく資金が途絶えた。
1929年、74歳になったBrennanは、ジャイロカーを開発した。これは、オースチン、モリス、ローバーの合弁会社のためだったが、結局プランは却下された。売れない自動車は作らない、という基本方針があったからだ。
作用原理
基礎理論
車両が、通常のレール1本の上を走行する場合、バランシング・システムがなければ転倒してしまう。スピンするディスクは、ジンバルフレームにマウントされ、そのフレームの回転軸(歳差運動=すりこぎ軸)は、スピン軸と直角である。このメカニズムが、車両のシャ-シにマウントされ、このとき、スピン軸、歳差運動軸、車両のロール軸が互いに直角となる。
ロール軸に対してジャイロトルクが働くのは、ジンバルを傾ける力が加わったときに、ディスクの歳差運動が励起されるからである。これによって、メカニズムは、垂直から傾いたときに車両を戻す能力を持っている。回転するジャイロのディスクは、ジンバル軸とスピン軸を関連づけ、この作用(ジャイロ効果)が車両をロール軸に対して安定的に保持する。
基礎的な挙動は、おもちゃの地球ゴマでよく理解できるだろう。
ジンバルの制御トルクが力学的にパッシブ(受動的)であれば理想的である(それならば、バネやダンパやレバーの組み合わせで実現できる)。だが、原理的にこれは不可能である。平衡の位置は、車両が直立した状態であり、このポジションからのいかなる乱れも、重心位置を下げる。すなわち、ポテンシャルエネルギィが減少する。車両を平衡に戻すものがなんであれ、ポテンシャルエネルギィを与える能力を持たねばならない。ということは、自然のパッシブ要素の組み合わせでは解決はできない。バランシングのシステムには、なんらかのアクティブ(能動的)なサーボが必要となる。
サ-ボの作動によって「浮かせる」ように、ジンバルに最小限の力を加えるわけだが、安全性の観点から、もし事態が深刻になったときには、車両を停止させ、転倒までの時間をかせぐように設計されるべきである。
パッシブ挙動
サーボの故障に対応できるようにするため、サーボがないときのバランス・ループがどのようなものかを知る必要がある。
車両/ジンバル/ジャイロのシステムを、独楽と仮定し、これを転倒させるモーメントを考える。基本的に1平面で起こる運動であり、これ以外の平面は考えない。動きは、2種類の揺動を示す。高周波数の章動(nutation)モードと低周波数の歳差(precession)モードである。ジンバルに対する帰還(feedback)がまったくなければ、ジャイロは単なる死荷重となり、車両は簡単に倒れてしまう。
転倒モーメントは、トップ点が垂直軸から変位するほど大きくなり、さらにその変位を増加させる傾向を持っている。ロール角とともに変化するモノレールのロール・モーメントも同様である。しかし、フリーのジンバルにはモーメントは生じない。
独楽を真似るために、ジンバルのモーメントもまた、ジンバルを水平の平衡位置から離そうとする。ジンバルのマウントは不安定でなければならない。これはトグル機構のように設定される。つまり、よくスイッチに使われている機構と同じだ。この不安定なマウントによる作用は「歳差運動の加速」と呼ばれている。
トップへビィのジンバルでも良いが、スプリングを使ったメカニズムの方が好ましい。何故なら、後者は加速度やバンクの影響を受けないからだ。
安定したジンバルのマウントは、工学的な直感では好ましいものと考えがちだが、実は壊滅的である。転倒モーメントと同じ感度で、ジャイロのモーメントが加わり、反発するどころか、転倒をさらに助長し早める。帰還がまったくないときよりも酷いことになる。
ジンバルへの帰還によって、システムの挙動はほとんど静止しているように見える。しかし、いずれはロールに関する歳差運動を示すだろう。それは時間経過とともにだんだん大きくなる。システムに生じる摩擦(ジンバルのピボットなど)がエネルギィを消費し、結局は重心位置の平均高さを下げる傾向を持つからだ。
注意深く設計すれば、ロールの振れの時間を稼ぎ、別の方法で車両の安全を確保できるかもしれない。バランスを取るシステムの設計が可能だということだ。万が一、サーボが故障したときには、動的には不安定なシステムに降格するが、それでも静的安定性は保持している。
たとえば、反トルクを作用させるディスクや、荷重の横方向シフトを行うシステムの選択もあるが、この場合もジャイロのバランシング・システムの余剰静的安定性がものをいう。しかし場合によっては、サーボが故障したとき静的・動的両方の安定性を失うこともあるだろう。
歳差運動の減衰
力学的帰還の導入は、車両を立たせておくための主設計に行き着く。しかし、パッシブシステムによく生じる発散歳差運動は、明らかに不安定であり、これにはなんらかのカウンタが必要である。この歳差運動を減衰させる方法に関しては、BrennanとScherlのバランスシステムの装置に違いがある。
まず、Scherl/Brennan(共通)の解決について考えよう。車両のロール角の発散の原因は、ジンバルの摩擦がトレースしたものであるため、ジンバルへの正の速度帰還を与える必要がある(効果としては負の摩擦)。結局、正の静的帰還がシステムの静的安定性につながるのである。
前述のように、動きは高周波(章動)振れと低周波(歳差)振れに分けられるが、通常、我々が気づくのは遅い歳差運動だけである。左右のローリングにより、ジンバルもまたスウィングし、この観察される動作が重なって、車両やジンバル両方で非常に早く起こり、すぐに減衰する。
速い動きは章動運動であるが、これは通常は見えない。しかし摩擦がなんらかの理由で符号反転したら(すなわち、動きと同じ方向に作用するような傾向を持てば)章動は、比較的大きく表れるだろう。減衰するかわりに、章動運動が大きくなり発散する。そして非常に速い章動によって車両は確実に突然倒れる。
正の速度帰還によって、壊滅的な効果を持った最初の兆候が表れる。しかし、BrennanやScherlが用いたトリックは、車両反応に表れる2つの動作の周波数を遠く分離することだった。
もしも、アクチュエータの反応が遅すぎれば、章動運動に影響し、また速すぎれば歳差運動に影響する。正の速度帰還は、歳差運動の減衰に用いることができるが、章動は摩擦によってしか減衰できない。
Shilovskyや何人かの専門家は、Brennanのデザインには本質的な欠点があると考えていた。彼のアプローチは別の理論に基づいている。ロール角のキャンセルをするシステムのデザインは、帰還の陽関数にロール角を含まなくてはならない、と彼は結論している。
すべてのShilovskyデザインは、陽関数帰還を用いており、通常、各種の振り子のメカニズムを利用して実現されている。ScherlとBrennanは、それぞれ線形比例した作動を用いた(それぞれ油圧と空気圧の違いはある)が、これと異なり、Shilovskyはいつもジャイロの回転から引き出される作動エネルギィを用い、作動は結果的には間欠的なものになった。この結果、車両の動きは必然的に安定状態の限界サイクルを含む形となり、つまり「ぐらつき」が生じる。これは好ましいものではない。線形比例作用がロール角帰還に使えないという理由は理論としては存在しないのに、Shirovskyは用いなかったのだ。陽関数ロール帰還では、章動と歳差運動の周期分離幅をさほど要求しない。これは、Brennanが求めていたものでもある。
ジャイロのサイズとスピン速度の設定によって、この分離がなされる。このため、Shilovskyのデザインでは、Brennanのものよりも小型のジャイロの使用が可能になった。システムは、さらに高速のものを要求し、結果として高価なサーボが必要になる。また、横方向荷重が加わったとき(たとえば、横風や荷重の偏りなど)、ジンバルが平衡点から振れた状態で安定を示す。ばたんばたんとする機構(Shilovskyの命名だが)によれば、サイクル限界の振幅を増す効果もあることが証明された。
横荷重
もし、一定の横荷重をジャイロだけで支えようとすれば、これを止めるためにジャイロのジンバルが素早く振れて、車両は倒れてしまうだろう。実際には、振れ限界付近のポジションでジャイロが荷重成分に抵抗しようとするから、メカニズムが傾き、撹乱に陥る。
加速度的な横力(カーブなどで発生)は、車両をコーナの内側へ傾ける。単一ジャイロでは、非対称に導かれ、車両を余分に傾けたり、少なめに傾けたりするので、対称の位置を保持する正味の力からはずれが生じる。このため、車上の人間は、横力を少し体感することになる。
コーナにおいて正しいバンク角になることを確かなものにするには、車両のターン速度によって起こるジャイロへのトルクを取り除く必要がある。
フリージャイロは、慣性系に支配された位置をキープする。ジャイロのモーメントは、スピン軸に直角な軸における回転によって生じる。しかし、制御システムは、シャーシとともにジャイロを振り動かしてしまうし、また動かない恒星の上にいるわけでもない。慣性系の内で、車両はピッチ軸にもヨー軸にも動くから、不必要なジャイロトルクを与えてしまい、これらが不満足な平衡を発生させる。一番深刻なのは、一方向のターン中に静的安定性が失われ、反対方向では逆に安定性が増すことだ。Shilovskyは、自動車でこの問題に直面した。左方向の急カーブが曲がれなかったのだ。
BrennanとScherlは、この問題を充分に認識していた。だから、バランシングシステムに、反転する2機のジャイロを用い、互いに反対方向に歳差運動させたのである。この配置によって、慣性系の車両の運動は、2機のジャイロに等しく反対の挙動を導き、結果的に不必要なものがキャンセルされる。このツインジャイロを用いれば、カーブにおける不安定さは解消され、車両は正しいバンク角になる。そして、車上の人間は横力を感じない。
Shilovskyは、ツインジャイロシステムによる安定確保では不充分だろうと疑問視していたが、その理由は明らかではない。彼の解法では、ターン速度によって制御ループのパラメータを変化させ、いずれの方向の応答も等しくするように保たれた。
偏った荷重も、同様に車両を傾かせ、支点の上に重心が来るまでずらす。横風も車両を傾け、自重の成分を利用して抵抗させる。これらの力は、コーナリングのときと比べると乗客に不快感を抱かせることになるだろう。何故なら、車上では、正味の横力だけを体感するからだ。
横力が加わると、Shilovskyのループでは、ジンバルの振れにバイアスが生じる。これは重心位置を横方向にシフトさせるような、緩慢なループの入力として利用できる。こうすれば、車両は慣性力のない状態の直立姿勢に保持される。このジャイロと重心シフトのコンビネーションは、1962年のパテントである。ジャイロとペイロードの横シフトを用いた車両は、Ernest F. Swinney, Harry Ferreira, Louis E. Swinneyらによってアメリカで1962年に製作された。このシステムは、Gyro-Dynamics monorailと呼ばれている。
2本レールを上回る有利な可能性
通常の鉄道を凌駕するモノレールのアドバンテージは、Shilovskyによってまとめられている。一般に、このアドバンテージが、上記の挙動を補うものと考えられていた。通常の鉄道の限界を考えたとき、まず思い浮かべるのは、hunting oscillation(蛇行)やレールの付着力の問題だろう。以下に、それらの問題点を挙げる。
ユニバーサルゲージの路線
線路のゲージは国によってさまざまである。違うゲージの他国を旅する列車は、荷物を載せ換えたり、車軸を変化させたりしなければならず、時間もコストも消費する。1本レールであれば、この問題は消え、簡単にインターナショナルな鉄道が誕生する。
交通の優先権の問題
モノレールを選択すれば、コーナリング能力がバンクによって高まる。さらに、付着の信頼性という地表面交通の開発における核心的問題の解決にも結びつく。主として、これまでの鉄道に比べ、勾配やカーブに柔軟に対応できるようになるからだ。典型的な高速列車は、半径7kmといったカーブを要求するが、途上国ではこの条件は困難だろう。ほとんどの土地が個人か企業のものなのだから。
トータルコストの削減
個々の車両は高価になるが、永久路線の工事とメインテナンスは巨額のコストを要し、グランドレベルのモノレールの方が安いことはまちがいない。
穏やかな転倒モード
安全の分野では信頼性が最も重要である。ジャイロの角運動量は非常に高く、動力が失われても、よく設計されたシステムならば30分程度は大丈夫であり、危険はない。サーボ、動力源などは位置的にも故障が発見しにくいデザインになりがちだが、充分な安定性を追及すれば、サーボの故障時にも車両を安全に停止させられるはずだ。どんな場合でも、二重のバックアップが(たとえ手動でも)必要であり、そういったバックアップがあれば大問題にはつながらない。
安全を考えたとき、慣れ親しんだ基本と比較することが重要である。この場合は、2本レールの車両の横安定性を原点とすべきだろう。横力が生じたとき、危険な状態のきっかけというものはない。普通、車両が転倒し始める臨界点になるまで兆候はないのでわからない。2本レール車の抵抗モーメント、つまり転倒に対抗する作用はあるものの、それは一定であり、車両を助けることはできない。
一方、ジャイロトレインでは、横力が大きくなるほど、車両はその力が来た方向へ傾くので、危険な状態は早期に警告されている。常に転倒力に応じて抵抗力が増し、さらなる傾きを防ぐ。このような穏やかな倒れ方は、2本レールにおける突然の転倒よりもソフトで、一般にも受け入れられるだろう。
規定の傾き試験において、ジャイロトレインは、傾いた路面上でも直立して静止することができた。
重量の削減
重量については、Shilovskyが、普通の2本レールの車両に比べて実質的に軽くデザインできると指摘している。ジャイロの質量は、Brennanによれば、車重の3~5%であり、これは、1本レールに対応するボギィ台車で節約できる重量と比べられることになるだろう。
高速の可能性
高速化は通常直線を要求する。これは、新天地では土地権利の問題に直面する。急カーブに対応するために車輪のプロフィールを設計すると、古典的なhunting oscillation(蛇行)が低速で生じる。1本レールを走れば、これを効果的に鎮められるはずだ。
数学的解析
はじめに
ジャイロモノレールの挙動に関する定量的解析は、大半の層には入手しにくいものである。文献の多くは定性的な記述に限られたものだ。理論解析を理解できる人々には、最初の公式から扱われている挙動を証明することができるはずである。
この解析は、完全でありトレース可能なように、つまりここ以外の部分の定性的な履歴をバックアップするために提示した。非数学系の人は無視した方が安全かもしれない。
運動方程式
安定性は、運動方程式から特定方程式を導くことで確認される。
垂直に対するロール角をφ、ジンバルの振れ角をθとすると、車両のロール軸に対して作用するジャイロスコープのトルクは以下のように表される。
ここに、Iとは、ジャイロの回転軸に関する慣性モーメント。また、ωは、その回転速度である。これらをまとめて、単に角モーメントHと呼ぶ。
車両を倒そうとするモーメントは、
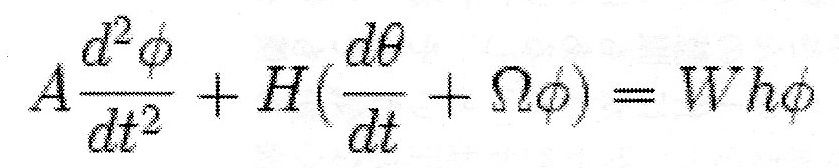
である。ここに、Wは車重、hは重心高さ。微小な揺動の運動方程式は、ロール軸に関して以下のように表される。
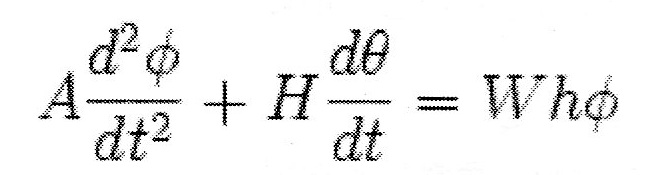
ここに、Aは、レールに対する車両の慣性モーメント。
明らかに、θを制御することによって、ロール角を制御でき、これをほとんどゼロに近づけておくことは可能である。しかしながら、その制御では、ジンバルの振れとロール角の双方を時間進行に従ってゼロに近づけておく必要があり、それにはジンバルの運動を考慮する必要がある。
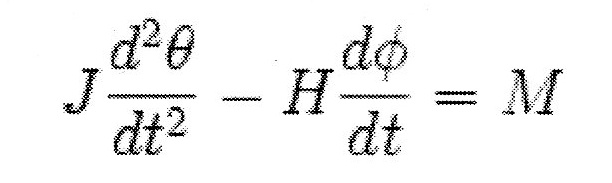
ここに、Jとは、ジャイロのジンバル込みの(ジンバルのピボットに対する)慣性モーメントであり、Mとは、ジンバルに作用するモーメント、すなわちシステムの制御入力である。
制御モーメントがない場合には、特定方程式は以下のようになる。
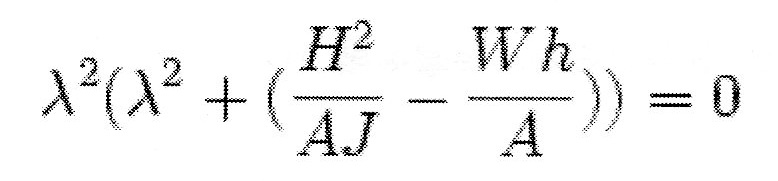
ここに、λは固有値。
もし、
であれば、システムは安定領域となるが、ジンバルの回転を止めるような抵抗力はないので、いずれは倒れることになるだろう。ジンバルの振れに比例した帰還(feedback)を導入していても、衝撃に対する静的安定性がなくてはならない。
ここに、kとは、ジンバルマウントの剛性であり、特定方程式は結局以下のようになる。

静的安定性には、定数項が正である必要がある。このため、ジンバルの剛性による帰還もまた、負ではなく正でなければならない。このメカニズムは、Shilovskyの言う「歳差運動の加速」を生じさせる。
摩擦
摩擦については、速度比例の粘性摩擦として取り扱うことが適切であると仮定する。効果的な制御入力は以下のようになる。
ここに、fとは、特定方程式に結果的に現れる粘性摩擦係数。

λの定数が負であると不安定になる。そこで、考察を進めると、この4次式の安定のためには、2次項から、以下の条件が導かれる。これは仮定によって成立したものである。
これは厳密な条件ではない。しっかりとした考察から、モデルの間に遠い分離が必要であるためだ。もし、近似による階乗処理を行わないならば、システムの安定性は、むしろ不安定な結果を導くだろう。BrennanやScherlのデザインは、2つのモデルの頻度として6:1の比を条件として要求している。
しかし、Shilovskyのデザインでは、より狭い分離幅を許容できる。このため、近似の分離解法は、いかなる実際のバランシング・システムにも適用できる。この2つの要素とは、以下のように表される。
章動(nutation) : 
歳差(precession): 
明らかに、歳差運動はマイナスによって発生する。fの符号を反転させれば、章動を不安定化させる。ここでは、ジンバルの速度の正帰還という共通の信念が働かない。これが、BrennanとScherlによって使われた解法の意味になることは事実である。
Brennan/Scherlのループ
いずれにしても、正帰還は、ある種のサーボのように働く。それは有限の反応時間を持っている。簡単のために、最初のオーダの遅れ反応を以下のように仮定する。
ここに、Cとは、サーボによってジンバルに作用する制御モーメントであり、τとは、サーボの時間定数、βとはゲインである。
ジンバルのモーメントは次のようになる。
もし、サーボ時間定数を、
の領域で選べば、特定方程式は、章動、歳差運動、そしてサーボモードに分離される。このうち、サーボモードを無視すれば、安定性の4次項を減らすことになる。

章動運動と歳差運動のモードが遠く離れていると仮定すれば、帰還は章動に大きく影響するようなことはないが、歳差の安定性に対してはポテンシャルを有する。結果として、より高い周波数のモードで効果を発揮するにはサーボは遅すぎる。歳差運動モードは、以下で与えられる。

予測される正の速度帰還ゲインは、ジンバルの摩擦よりも大きく、これは正の減衰となる。
Shilovskyのループ
Shilovskyによって提案された解法は、ロール角の帰還を含んでいた。これは、サーボモードの導入で安定性に影響するが、この解法の目的は、サーボ・バンド幅を有限に考慮することにある。制御のスキームは以下のようになる。
ここに、αはロール角の帰還ゲイン。安定性の4次式は、以下の形になる。

ここで、λの2乗の項は影響しない。だから、モード間の分離も、Brennanループで要求されたほど重要ではなくなる。つまり、より小さいジャイロが使えることを意味している。実際には、サーボを使うことを考えたとき、この装置のアドバンテージは小さくなる。歳差運動は、以下のように表される。

これもまた、ゲインの相応しい選択によって適切な減衰を得られるだろう。
安定状態の応答
システムが安定しているとき、横力に対する応答は、運動方程式の時間微分をゼロにすることによって求められる。
ここに、Lは、撹乱モーメントであり、これによって車両は動揺する。Brennanのループにおいては、ジンバルの平衡時の振れ角はゼロになるが、Shilovskyのループでは残留振れ角が生じる。
傾いた角度は慣性計測器(横方向加速度あるいは振り子のようなもの)によって検知されるが、こうするとコーナリングの加速度によってもジンバルの振れが生じてしまう。このジンバルの振れは、横力が加わったときだけに見られるものだが、計測器の片寄りもまた、ジンバルの振れの片寄りとなって表れる。
同様に、サーボの故障などによる一定のジンバルモーメントもまた、ジンバルの振れに一定量表れる。与えられた歳差運動の加速度が受動的に実行される。サーボの力は、このタイプの転倒に備えて、歳差運動を静止させるだけの力をジンバルに与えられる、充分なレベルである必要がある。
コーナを曲がるとき
車両がカーブに対応するためには、非常に大きな問題が立ちはだかっていた。特に、ジンバル軸が垂直のときである。ジャイロのピボットに対して作用する回転速度Ωに、このターンの速度が加わり複合される。だから、追加されたジャイロのモーメントは、ロールの方程式に導入される。
これによって、ターンのための正しいバンク角からのずれたロール角度になる。より厳密には、特定方程式の定数項を以下のように変える。
明らかに、ターン速度が次の基準値よりも過剰ならば、
バランシングループが始まり、不安定となる。しかし、この反対に作動する逆回転のジャイロがあれば、ロールのトルクをキャンセルし、不安定にならずにすむ。もし、1つめのジャイロの反対方向に歳差運動させれば、それによって同方向の制御トルクは作り出せる。
1972年に、カナダ政府軍の力学技術部は、この昔から認識されていた問題を主な理由として、モノレールの提案を却下した。彼らの解析は正しかったが、それは水平軸の1軸ジャイロに限定した分析にすぎなかった。つまり、片手落ちであった。
地球の自転の影響
慣性系の影響を受ける車両の運動は、典型的なカウンタ回転のツインジャイロの導入で相殺できるが、Shilovskyは、ターン速度に伴って、ジンバルの帰還を変化させることで解決できると主張した。
しかし、たとえ静止状態にあるときでも、車両はピッチ軸とヨー軸に回転している。何故なら、地球の自転による角速度ωがあるからだ。緯度Θにあるとき、地球の角速度の垂直成分は、ωsin(Θ)であり、水平成分はωcos(Θ)である。もし車両が、北に対してψの角度を向いているなら、水平成分は、北方向がωcos(Θ)cos(ψ)、東方向がωcos(Θ)sin(ψ)となる。(注:回転軸の方向は、角速度と関連している)
明らかに、最も水平成分の効果が大きくなるのは、車両が赤道上で東西いずれかを向いているときである。垂直軸ジャイロは、地球の自転の水平成分によって影響を受け、一方、水平軸ジャイロは、垂直成分による影響の方が大きい。垂直軸ジャイロは赤道上において最も好ましくない角速度にさらされるが、水平軸ジャイロが最大効果を受けるのは極点においてである。地球と同じ角速度の力を車両が受けるので、ジャイロの歳差速度を生じさせ、地球の回転速度(ω)に等しくなろうとする。しかし、バランシング・システムがジャイロを逸らさないように保持し、静止させようとするトルクHωが生じる。このHとは、ジャイロの回転運動量であり、車両のロール軸に作用するものだ。Hの値は、わずかな歳差運動でも安定性を失うことにつながるほど、とんでもなく高く、したがって、正味の歳差運動の効果は、次のようなロール角の変化となる。
地球の自転はまたジンバルの向きにも影響する。この効果は、地軸とロール軸が一致しているときに最大となる。すなわち、赤道上で南北いずれかを向いているときだ。ジンバルの振れの平衡に対する増分は以下のとおりである。
ここに、Kはジンバルの静的帰還(歳差運動の加速度)である。
10tonの車両を考えてみよう。Brennanの推奨値によれば、ジャイロの質量は300kgとなる。ディスクの直径と厚さの比を8:1と仮定すると、密度8000kg/m3の鉄ならば、半径は0.36mとなり、慣性モーメントは19.4kgm2となる。治金の精度限界内は、ディスクの周速は100m/sといわれているが、これはこの場合、278radians/s(約3000rpm)に相当する。この条件では、角運動量は、19.4×278=5393kgm2/sになり、重心高さ1.5mに対して、これを倒すモーメントは、10000×9.81×1.5=14715Nm/radianとなる。地球の自転速度は秒速0.00007radiansなので、これが最大歳差速度となり、この歳差速度から生じるジャイロのトルクは、0.38Nmになる。
地球の自転によって生じるロール角の増分は、0.000026radians、せいぜい1000分の1以下である。ジンバルの静的帰還も転倒モーメントに対して同じ大きさであり、最大ジンバル振れ角の増分も、地球の自転によって同じだけ生じる。すなわち、そのオーダは1000分の1以下である。
これらの考察で用いた仮定には誤差がある。しかし、地球の自転によって生じるトルクはまったく小さいと考えて良い。完全を期して、カウンタ回転のツインジャイロを備えれば、ほとんど影響はゼロといえるだろう。
ジャイロのサイズ
ジャイロの特性は、外力が作用しても壊滅的な転倒が起きないように正確に決定する必要があり、決められた安全性に対して、充分な時間内、安定を保つことが重要である。
ジャイロの回転が落ちると、章動と歳差の周波数モードがともに近づき、それらが等しくなる不安定なポイントに至る。通常の運行は、このポイントから遠い位置になければならない。そうでなければ、モードを別々に扱えないからだ。
安定の4次式の近似の要素分解によって妥当な基準が次のように導かれる。
帰還項は、転倒モーメント項と同一と仮定され、ジャイロの回転低下に対する余裕は、ジャイロの角運動量を次のように設定することで確保される。
あるいは、
ここに、ωは、ジャイロの回転速度である。
ジャイロのディスクが薄く、ジンバルのフレームも無視できるような場合であれば、
であり、ディスクの慣性モーメントは、
となる。ここに、Mは質量、rは半径。要求されるジャイロのサイズは、結局次のように推定される。
ここに、Uは周速度。
最大回転数
ガスタービンエンジンは400rpmを越える領域では、周速で設計される。過去50年にわたって何千機もの飛行機に、実際にこの設計法が用いられてきた。ここでは、10tonの車両のジャイロの推定をしてみよう。重心高さ2mとし、ジェットエンジンの設計の半分の周速を仮定すると、ジャイロの質量は140kgとなり、Brennanの推奨値である車重の3~5%というのは、かなり安全側であることがわかる。
(以上、2009年12月5日、森博嗣訳)
/1号館へ/
/3号館へ/
/4号館へ/
/5号館へ/
/☆Go Back☆/
)