|
 ここで、今回発見されたロボット、Bullwalkerの特徴を見ていこう。 但し、資料が限られている為、多くの部分は編集部の推測である事を始めにお断りしておく。 ここで、今回発見されたロボット、Bullwalkerの特徴を見ていこう。 但し、資料が限られている為、多くの部分は編集部の推測である事を始めにお断りしておく。
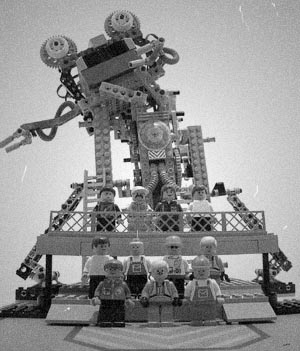
Bullwalkerは全体としては重心移動式歩行メカニズムの形態を取っているが、地上接地面の角度変化の最適化によってスムーズな歩行をすることが出来る。 上部ボディにはパワーユニット駆動用のディストリビューターユニットと制御装置、通信ユニットが装備される。 マニュピレーターも左右に実装され、上部全体はパンタグラフ式にフローティングマウントされている。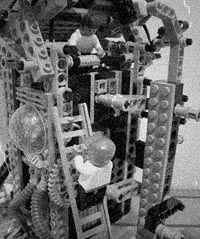
右の写真は組みあがったボディ中央部である。両足はシンプルな平行移動メカだが、接地面を変化させるためのリンクが写真右下に見える。 メインシャフトの結合はシャフトに対し抜き方向の大きな力が働くために、当時最新のT-ペーパー方式の結合補強がなされている。
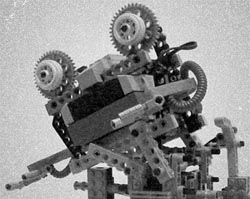
メインパワーユニットは本体中央部に一つあり、これ一つで両足の駆動と上部のスイングを行う。 当時はモーターのパワーと重量・速度のバランスをいかに取るかが重要な問題で、複数のパワーユニットを連結する試みもされた。 左下はハジン自らがメイン駆動シャフトの中央にある光学式センサーのターゲット調整を行っているところだ。 ここは組みたて後は封印されてしまうため、露出状態で見ることはめったにない貴重な一コマである。
 同時に発見された資料の中に、小さなシリコン系チップのメモリーが発見された。内部は実装度が少なく簡単に解析できたが、その中に興味深い動画が記録されていた。 当時のロボットの歩行を捕らえた動画は非常に珍しく、動きの稚拙さがノスタルジックでもある。 実際の大きさに比べて動作が速すぎるが、当時の動画フォーマットそのままでのフレームレートであるので、そのまま掲載した。 実際の動作は最盛時に五倍程のスローモーションをかけると適性になる。 同時に発見された資料の中に、小さなシリコン系チップのメモリーが発見された。内部は実装度が少なく簡単に解析できたが、その中に興味深い動画が記録されていた。 当時のロボットの歩行を捕らえた動画は非常に珍しく、動きの稚拙さがノスタルジックでもある。 実際の大きさに比べて動作が速すぎるが、当時の動画フォーマットそのままでのフレームレートであるので、そのまま掲載した。 実際の動作は最盛時に五倍程のスローモーションをかけると適性になる。
映像の最初の部分でマニュピレーターとレーダー(注4)が回転している。このBullwalkerには歩行用のパワーユニットとは別に、方向転換用と思われる振動子用高速型パワーユニットがボディ最下端に実装されている。 前述のマニュピレーターとレーダーの動きはこのユニットの振動によるものである。 歩行中にこの振動子を動作させることで方向転換をすることを目的にしたのだろうが、全体をブルブルと振るわせるだけで、方向転換には至らなかったようだ。 この振動子形回転装置は、古くはSCHUCO社のダンスロボットシリーズで応用されていた技術だが、このBullwalkerでそれが成功したか否かは今回の資料では記述がなかった。今後の研究に委ねたい。
さて、今回発見されたBullwalkerいかがでしたでしょうか? 編集部では、皆さんのご意見、ご感想など、随時募集しています。
(週刊ロボット時代編集長:ヤーマ・ディーマハ) |



 ハジン・ハージン(BF.560頃~455頃) 日本生まれ。国籍は不明。 Milennum-Boyシリーズで一時代を築いたが、そのあまりにも突拍子もない発想に人々は離れ、晩年はさびしく過ごしたという。 サントスの名作「ハリムとハムニ」(注2)のハリムは彼がモデルだと言われる。 但し、彼がハリムの様に酒とドラッグにおぼれていたかは、はなはだ疑問である。 トルピリンなどの発想刺激剤(注3)のない当時、酩酊状態でアイディアが次々と浮かぶと言う事は絶対にあり得ないからである。 彼は自分の頭のみで考えた最後の世代の科学者なのかもしれない。
ハジン・ハージン(BF.560頃~455頃) 日本生まれ。国籍は不明。 Milennum-Boyシリーズで一時代を築いたが、そのあまりにも突拍子もない発想に人々は離れ、晩年はさびしく過ごしたという。 サントスの名作「ハリムとハムニ」(注2)のハリムは彼がモデルだと言われる。 但し、彼がハリムの様に酒とドラッグにおぼれていたかは、はなはだ疑問である。 トルピリンなどの発想刺激剤(注3)のない当時、酩酊状態でアイディアが次々と浮かぶと言う事は絶対にあり得ないからである。 彼は自分の頭のみで考えた最後の世代の科学者なのかもしれない。