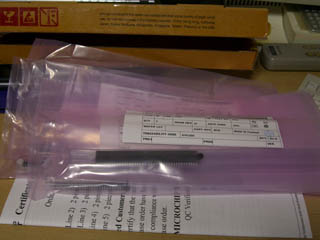
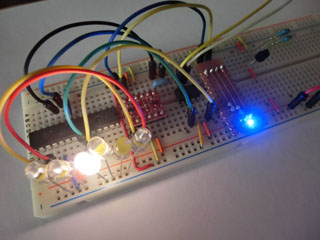
PIC奜偟偰儔僀僞偱從偄偰偲偄偆嶌嬈偵姷傟偰偟傑偭偰偄傞偣偄偐丄ICSP愙懕偑曋棙側偺偼敾傝傑偡偑棊偪拝偐側偄偺偱ZIF僜働僢僩乮僛儘僾儗僢僔儍乕僜働僢僩乯斉傪嶌傝傑偟偨丅
昞岦偒偼偡偭偒傝偟偰傑偡偗偳棤偼斶嶴偱偡丅恀柺栚偵攝慄偟偰偨傜巰偹傞偺偱億儕僂儗僞儞摵慄偱僓僋僓僋宷偘偰偄傑偡丅8/18/28/40pin偺PIC偵懳墳丅掞峈偼ZIF僜働僢僩偺壓丅PICkit2傪捈巋偟偱巊偭偰傑偡偗偳屻偵庤偑嬻偄偨傜働乕僽儖傪嶌傞梊掕丅
師偵PIC奐敪偵巊偆尵岅偱偡偑丄偝偡偑偵崱夞偼傾僙儞僽儔側傫偐巊偭偰傜傟側偄偺偱俠僐儞僷僀儔傪巊偄傑偡丅偪側傒偵巹偑巊偭偰偄傞偺偼mikroC丅
弶傔偰怗偭偨PIC-C偑僐儗偱丄偡偭偐傝姷傟偰偟傑偭偨偲偄偆偺傕偁傝傑偡偑丄戞堦岓曗偲偟偰嫇偘偰偄偨MPLAB-C18偺CAN儔僀僽儔儕偑儚働傢偐傫偹乕忬懺偱mikroC嵟崅偲巚偭偰偟傑偭偨偩偗偱偡丅
栤戣偼帋梡斉偺梕検惂尷丅16F宯偼2KB惂尷偱偡偑18F宯偼偳偆傗傜4KB偵忋偑偭偰傞傛偆偱僥僗僩揑側僾儘僌儔儉側傜栤戣側偔慻傔傞偺偱偡偑丄偙傟偑惂屼宯傑偱擖傟傛偆偲偡傞偲慡慠懌傝側偄乮偮傑傝梕検偺戝敿偑儔僀僽儔儕偱徚旓偝傟偰偄傞乯乗乗PIC奐敪偼偄偮傕偼傾僙儞僽儔偐丄傕偟偔偼mikroC傪巊偆偙偲偑偁偭偰傕2KB傪挻偊傞僾儘僌儔儉側傫偰偦偆偦偆彂偐側偄偺偱惓捈峸擖傪柪偭偰偄傞偲偙傠丅偝偰偳偆偟偨傕偺偐丒丒丒丅
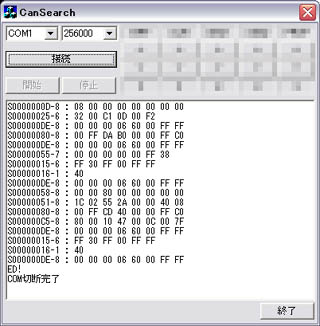
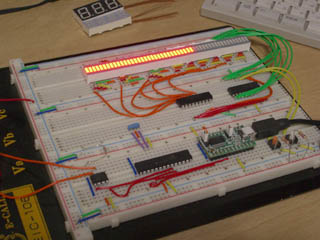
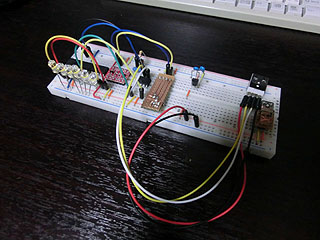
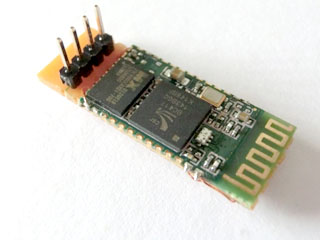
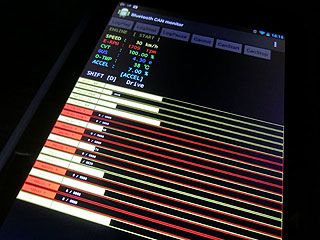
師偼USB儌僕儏乕儖宱桼偱PIC-PC愙懕傪偡傞偨傔揮憲壜擻側儃乕儗乕僩傪僠僃僢僋丅PIC16F628偺撪憼僆僔儗乕僞乮4MHz乯偱愙懕偟偨帪偼
19,200bps 偑尷奅偱偟偨丅偦偙偱丄PIC18F2480偵HS10MHz傪愙懕偟偰PLL-ON丄撪晹揑偵40MHz嬱摦偝偣偰偳偙傑偱埨掕偟偨捠怣偑偱偒傞偐傪僠僃僢僋偟偰傒傑偟偨丅偲偄偆偐柺搢偱偁傑傝徻偟偔偼挷傋偰偄側偄偺偱偡偑丄彮側偔偲傕
256Kbps 偼慡偔栤戣側偟丅崱夞偺梡搑偲偟偰偼廫暘偡偓傞懍偝偱偡丅 |