�f�o�r�̎d�g��
�i�����E�덷�����A����ҁA�u�݂��т��v���x�j
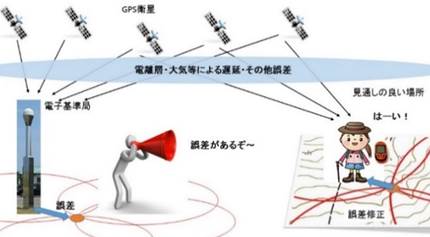
�g�߂ɂȂ���GPS�ł����A�ӊO�ƌ�����m�炸���p���Ă����������X����܂��B�����u�݂��т��v�ɂ��ẮA��M�o����������P�������P���ł̐��x��������Ɗ��Ⴓ���������������܂��B���̃y�[�W�ł́A�u�݂��т��v�̎d�g�݂��܂ߏo���邾��������₷������������܂��B�i2022�N���j
�܂�GPS�iGlobal Positioning System�j�́A�č����グ��GPS�q���𗘗p���Ă��܂��B
�č��ȊO�ɂ����E��GPS�i���m�ɂ�GNSS�j�͌��ݑ����Ă��܂��B�i���N�������Ă���̂Ő��͎Q�l�ł��B�j
GPS �|�A�����J�i2022�N31�@�j
GLONASS �|���V�A�@�i2022�N25�@�j
Galileo �|���B�@�@�i2022�N28�@�j
QZSS �|���{�@�@�i2022�N4�@�j
BeiDou �|�����@�@�i2022�N49�@�j
IRNSS �|�C���h�@�i2022�N7�@�j
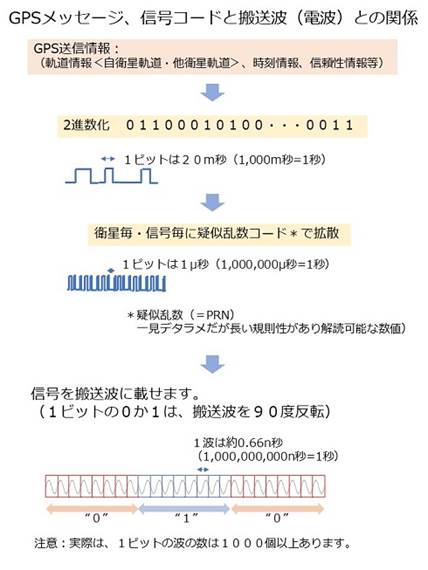
GPS�q�����甭�M���ꂽ�i�M���R�[�h�j�d�g�́A���̑��x�Œn��ɓ��B���܂��B
��299,792,458 m/s�i��30���L�����[�g�����b�j
���M���ꂽ���ԂƁA�����������Ԃ��v�����邱�ƂŁA�q������̋����𑪒肵�܂��B�i�����W���O�ƌĂ�Ă��܂��B�j
�d�g���B���ԁiGPS�q������M���j�@�~�@�d�g���x�i�����x�j�@���@GPS�q������̋���
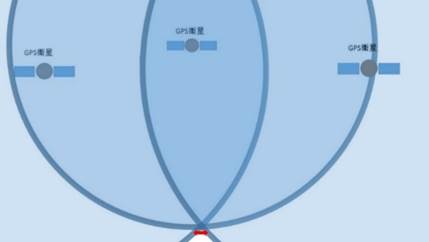
GPS�q������̋�����������ƁA���̉q���𒆐S�Ƃ��������a�Ƃ��鋅�ʏ�̂ǂ����ɋ��邱�ƂɂȂ�܂��B
�q���̈ʒu�i�O���j��GPS���瑗�M����ĕ�����܂��̂ŁA�R�ȏ�̉q������̋��ʂ̌�_�����ݒn�Ƃ������ƂɂȂ�܂��B�i��M�̊m�F�ɐM���R�[�h���g�����Ƃ����R�[�h���ʕ����Ƃ��Ă�Ă��܂��B�j
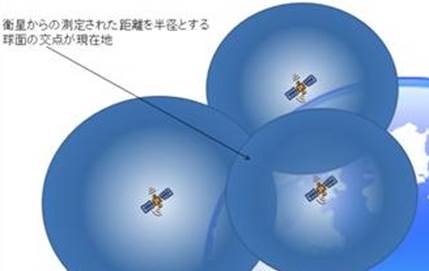
�e�q�����瑪�肳�ꂽ�����̌�_�����ݒn�ł��B
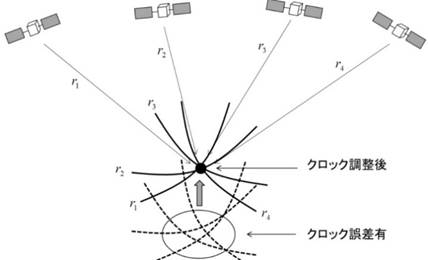
���̑��x�̐M���R�[�h���B���Ԃ𐳊m�ɑ��肷�邽�߂ɂ́A���q���v���K�v�ƂȂ�܂��B�@
GPS�q���ɂ�2��ȏ㓋�ڂ���Ă��܂����AGPS��M���ɓ��ڂ��邱�Ƃ��A�R�X�g�A�T�C�Y�I�ɏo���܂���B���̂��ߐ������U���v�i�N�I�[�c�j�𗘗p���܂����A���x���������߁A�q������͂����Ԃŕ���Ȃ��瑪�肵�Ă��܂��B
�i������ɂ́A�Œ�4�q�����K�v�ƂȂ�܂��B�˂S�̖��m���̘A���������������K�v������܂��B�j
�P�������̑��x�Œʉ߂��鎞�Ԃ́A0.00000000333564 �b�ł��B�i�ق�̏����x�����邾���ő傫�Ȉʒu�덷�������܂��B�j
�]�k�ł����A���ΐ����_�ɂ��ƒn��Ɖq���ł͐i�ގ��Ԃ��Ⴂ�܂��B�i1���@��R�O�}�C�N���b�i�ށF�G��Newton���j
�q�����̌��q���v�́A���̌��ۂ�����d�g�݂������Ă��܂��B�i�����j
GPS�덷�̌���
GPS�̈ʒu�덷�͏�ɐ����[�g���݂�܂��B�ɒ[�Ɉ����ꍇ�͂P�O�O���ȏ�ƂȂ�܂��B�덷�̌����͈ȉ��̂X����A���̌��������킳�萶���Ă��܂��B�i���F�덷���͎����ɂ��Ⴂ������܂��B�j
�P�j�č����{�ɂ���Ӑ}�I���x�ቺ��SA(Selective Availability)
��2000�N5������������Ă��܂��B
�Q�jGPS���q�������v�덷 1�`2�����x
�R�j�q���O�����̌덷 1�`4�����x
�S�j��C�x���i�d���w�E�����j
�y�d���w�z�x���@�@�@�@ 2�`20�����x
�����z�t���A�Ȃ����z�������������Ƌ}���Ȍ덷�ϓ����܂��B�i�d���w�V���`���[�V�����ƌĂ�܂��j
���n��ɂ��x�������قȂ�܂��B
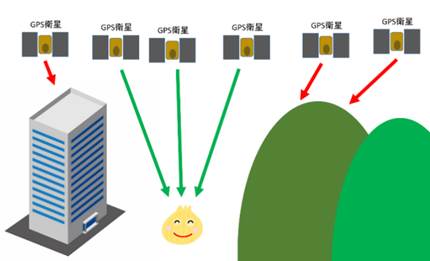
���������i�n�����j�t�߂̉q���͉e�����傫�����ߑ��ʂ��珜�O���܂��B
���u�v���Y�}�o�u���v��C�d�͔g�ɂ��e�����܂��B
�y�����z�i��C�A�����C�j �������x
���V�C�i�����C�A�_�j�̉e�����܂�
�T�j������R�������i�}���`�p�X�j ����
�U�j��M�@���̎��v�덷 1�����x
�V�j���̑��m�C�Y��M�������i�g�ѓd�b<LTE�d�g>�A�d�q�@���Ɗ��A�W�Q�d�g���W���~���O���Ȃǁj
����M�������̌����ƂȂ�X�j�։e��
�W�j�V�X�e����Q
�������܂�ɔ������Ⴊ����܂��B
�č�GPS�@2004�N1��1���i�����j
���V�AGLONASS 2014�N4��1���i�����j
EU�K�����I2017�N1��18���i�����j
�X�j�q�����z�u�E�⑫���s�� �@���\��
�����ꂪ�A��Ԍ덷���傫�Ȍ����ł��B
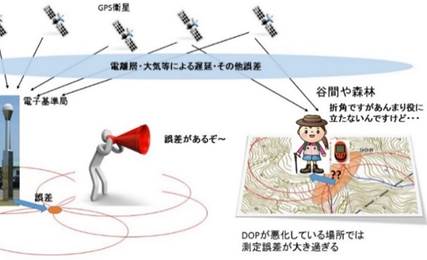
�f�o�r�q���̔z�u�́ADOP�iDilution of Precision�F���x�ቺ���j�Ƃ������l�ŕ\����܂��B�q����M�������Ȃ�GPS�q���ʒu������Ă��Ȃ��ꍇ�́A�O�p���ʂŌ덷���傫���Ȃ�܂��B
�i�����R�j���o�V
���̑��ʌ덷�͎�M�@���ƂɈقȂ邽�߁ADGPS�i���L�L�q�j�ł̕���o���܂���B
���̐}��DOP�i���ʐ��x�ቺ�j�̃C���[�W�}���ł��B
�q������̑��苗���a�Ƃ����~�i���ۂ͋��ʁj���d�Ȃ�ꏊ�����ݒn�ł��B�q���̊Ԋu���L���ꍇ�́A��_�͋����͈͂Ŏ������邽�ߑ��ʌ덷�͏������Ȃ�܂��B�i��L�Ԗ��j
�R��r���̉A�ɂȂ�Ǝ�M�o����GPS�q���������B���̂��ߌ�������߂��q���̂ݎ�M���邱�ƂɂȂ�܂��B

�q�����߂��ꍇ�́A�~�̌�_�͈͂��L���Ȃ��Ă��܂��A�����̌덷�i�~���̐��̑����ŕ\���j�ł��傫�Ȉʒu�̕ω��������܂��B�i���ʌ덷�j���̏�DOP�̈������Ă����Ԃł��B
�i�R�ł�GPS���x���|�[�g����������j
GPS�iGNSS�j�q������̏��
�P�j�d�g�i���g���j�ƐM���i�R�[�h�j
�ЂƂ̓d�g�i���g���j�ɕ����M���i�R�[�h�j���������܂��B
L1 (1575.42MHz�j
�@L1C/A�R�[�h�F��ꐢ��̖��ԗp�M�� �˃J�[�i�r�A�X�}�z��GARMIN�͎�M�\
�AL1C�R�[�h�F��O����̖��ԗp�M�� ��GNSS�݊��i��GPS��2020�N����ŏ�J�n�j
�BL1M�R�[�h�F�ŐV�̌R�p�M���i��Ǖs�j-����
L2 (1227.60MHz)
�@P�R�[�h�F��ꐢ��̌R���p�M���iY�R�[�h���t�������Ǖs�j
�AL2C�R�[�h�F���̖��ԗp�M��
�BL2M�R�[�h�F�ŐV�̌R�p�M���i��Ǖs�j
L3 (1381.05MHz)
�j�����T�m�V�X�e���p
L4 (1379.913MHz)
�d�����w�̏������W�p
L5 (1176.45MHz)
�@L5C�R�[�h�F���̖��ԗp�@��GNSS�݊�
����GPS�q�����瓯�����g���Ŕ��M�����M�����Ȃ����M���Ȃ��̂ł��傤���H�@�܂����ԗp�ŕ����M����R�p�ƍ��ݏo�����肷��͉̂��́H
����͌ŗL���g�U�����Ƃ������̂��t������Ă��邽�߁A�e�M������M���őI�蕪���邱�Ƃ��o���邽�߂ł��B�����͋^�������i�ꌩ�f�^����������ǂł��鐔�j�Ȃ̂ło�q�m�iPseudorandom noise codes�j�ƌĂ�Ă���A�b�^�`�R�[�h�A�o�R�[�h�A�x�R�[�h�A�b�R�[�h�A�l�R�[�h��������܂��B
�M���g�U�͌g�ѓd�b���ł��g���Ă���CDMA�Z�p���X�y�N�g�����g�U�ƌĂ�Ă�����̂ł��������ł͐G��܂���B
�Q�jGNSS�q�������M��������
✓���M�������t�Ǝ���
�i�q�����N�̏�Ԃƒ���A�N���b�N��W����t���j�B
✓�����̉q���̈ʒu
�i�G�t�F�����X�ƌĂ�Ă��鐸�x�̍������ŁA�L������4���Ԃł��B�j
✓���q���̋O���̏��
�i�A���}�i�b�N�ƌĂ�Ă���r����L������6���ԁ��ł��B�S�q������M����̂ɖ�P�Q���|����܂��B���ʉ\�ȉq���������邽�߂ɗ��p���܂��B
GPS�̓d�������Ĉʒu����Ɏ��Ԃ��|���闝�R�͂��̏�����肷��̂Ɏ��Ԃ��|���邽�߂ł��B
�X�}�z��A-GPS�Ƃ����d�g�݂ŁA�l�b�g�o�R�ł��̏�����肷�邽�ߑf�������ʂ��J�n�o���܂��B���A���h���C�hOS���ڂ̏ꍇ�́AEPO�t�@�C��: Google Android GPS Extended Prediction Orbit Data�ŁAGarmin�̏ꍇ��CPE�t�@�C��:Connected Predictive Ephemeris�@�ƌĂ�܂������g�̏��͓����ł��B�j
✓�d���w�̏��
�i�gKLOBUCHAR�h�ƌĂ��A�덷���傫�ȍr�����B�j
�ł��B
�ڍׁFhttps://www.enri.go.jp/~sakai/pub/symp07a.pdf
GPS�덷�C����i
Differential GPS�i���Α��ʕ����j�B��������DGPS
�ʒu���������Ă����d�q��_�ŁA�f�o�r����M���܂��BGPS���瓾��ꂽ�ʒu�Ɩ{���̈ʒu�Ƃ����i���f�B�t�@�����V�����j�͂��܂��B�i�q���O���A�d���w�̒x����덷�́A�߂��ɂ����M�@�ɑ��ẮA�قړ����ʒu�덷�������܂��B�j
���̌덷�������炩�̎�i�ŁA�e�f�o�r��M�@�ɏ���͂���K�v������܂��B�������ǂ�����P�����x�̌덷�܂Ő��x�����߂邱�Ƃ��o���܂��B���Q�l
�y���ʂ��̗ǂ��ꏊ�ł�DGPS�ɂ���͑�ϗL���z
�y�J�Ԃł́ADOP�����ł̌덷���傫����DGPS�ɂ���͂��܂���ɗ����܂���z
�d�q��_����f�o�r��M�@�Ɍ덷����͂����\�I�ȕ��@�́A�ȉ��S����܂��B
�@�e�l�d�g�ł̑��M�@
���Q�O�O�W�N����I���B�Q�l�P�@�����Q
�A�C��ۈ����̃r�[�R���@�i�����j
���C������ŁA�R�����ɂ͕s�����ł��B�i�Q�O�P�X�N�R���P���p�~�ς݁j
�B�Î~�q������̑��M
���r�a�`�r�isatellite-based augmentation system�j��v�G���A�ŃT�[�r�X
��F �iWAAS�j�@
�k���E�A�t���J�F �iEGNOS�j�@
���{�FMTSAT �iMSAS�j�����{�ł́u�Ђ܂��v����QZSS�Ɉ����p��
�C���h�FGAGAN
��L�ȊO�F���V�A�iSDCM�j�A�A�t���J�iSAFIR�j�A�؍��iKASS�j�A�����iBD-SBAS�j�i�����j
�C���V���q���u�݂��т��v�ɂ�鑗�M
L1S�M���AL5S�M���AL1Sb�M���i�⋭�M���j�ŁADGPS�����Q�O�Q�O�N�S������J�n�i�����j
�������_�i2021�N1���jGARMIN�ł�L1S,L5S,L1Sb��M�s�ł��B
�r�a�`�r�̖����i�����j
�{���A�q��@�p�ɗp�ӂ��ꂽ�덷���⋭�̎d�g���ł����A��ʌ����p�r���L�����Ă��܂��B�iDGPS�������j
�덷�C���ȊO�ɂ́A�q���̌��N��Ԃ����j�^�[���đ��ʂɗ��p���Ă��ǂ����Ȃǂ̐M�����������Ă��܂��B
�����q��ƊE�ł͈��S�d���̂���GPS�����S�ɐM�p���Ă��炸�A�A�v���[�`�⒅���Ɏg���Ă̓_���ȐM�����ቺ���ԑт�\����RAIM�iReceiver Autonomous Integrity Monitor�j���ăp�C���b�g���ʍ����Ă��܂��B
��SBAS�M���́AGARMIN�Ŏ�M�\�i�����j
�q���̔ԍ��ɂ���
�q���i���m�ɂ͉q�������M���Ă���e�M���j�ɂ�PRN�ԍ���NMEA�ԍ��̂Q���t���Ă��܂����APRN�ԍ��ipseudo random noise���^�������ɂ�鎯�ʔԍ��j�́AWEB�Ŋm�F�ł��܂��B
���V�[�o�ɕ\�������NMEA�ԍ��́A�S�ĊC���d�q�@�틦��iNational Marine Electronics Association�j�����߂Ă��܂��B
�Q�̔ԍ��̊W�́A���L�ł��B
�E�č�GPS�F1�`32�@�@NMEA=PRN
�ESBAS�F33�`64�@�@�@NMEA=PRN-87
�EGLONASS�F65�`96�@NMEA=slot+64
�f�o�r�����������i❶�X�^�e�B�b�N���ʁA❷�L�l�}�e�b�N���ʁj
GPS(GNSS)���u���ʁv�ȂǍ����x�Ȍv���i�����`�����P���j�ɗ��p������@�łQ�O�N�ȏ�̎��т������@�ł��B
�n�k�ϓ��̊Ď��A�y�n�������H�E�y�Ȃǂ̑����A�n�}�쐬�A�R�x�W���̌v���A���̍������x�����߂���ꍇ�Ɏg���܂��B���Q�l����

�y�؍H������ł�GPS�ɂ�邃���P�ʂ̐�������
�P���ȉ��̐��x�����߂�ꍇ�́A�M���R�[�h�i���̑��x�j���B���ԂŌv���͌��E�ł��B������GPS�����M���Ă�������g�i�d�g�j���̂��̂𑪒肷��Z�p�����p������Ă��܂��B
�����g�i�܂�d�g�j�̈ʑ��i�܂�Y���j���ϑ����邱�Ƃŋ����v�����邽�߁A�����ʁi�܂��͔����g�ʑ����ʁj�ƌĂ�Ă��܂��B
GPS�̏����ǂ̂悤�ɔ����g�ɏ悹��̂��́A���L�}�����Q�Ƃ��������B
��L�}�́AGPS�̏���d�g�ɏ悹�闬��ł��B�悹��d�g���w�����g�x�Ƃ��Ă�Ă��܂��B
❶�X�^�e�B�b�N�����i�Î~�_�����j
�����P���̒������x�ɑ��ʂ��邱�Ƃ��o���܂����A���ʂɂ�1�`2���Ԉȏ��|����܂��B��_�������K�v�i�����Ɋϑ��j�ŁA��_�ɋ߂��قǐ��x���オ��܂��B
�����Ɍ��ʂ������炸�A��U�I�t�B�X�Ɏ����A��v�Z������K�v������܂��B����A�����̊�_�Ŋϑ������f�[�^��IGS�Ƃ����@�ւ���̍����x�̐����q���O���f�[�^�i�������ƌĂ�Ă��܂��B�j�Ɠ˂����킹����K�v�����邩��ł��B
GPS�q�������M���Ă���O�����i�������j�́A�����[�g���̌덷������܂����AIGS�������\���Ă���O�����x�͍ŏI�̐�����i1�`2�T�Ԍ�j��5�p�ȉ��ł��B�i�����j
�@�@
�i�W�����ʃC���[�W�j
�X�^�e�B�b�N���ʂ̐��x�͏����ɂ��قȂ�܂����T�`�P�Omm�ł��B
❷�L�l�}�e�b�N�����i�ړ��_���j
�wkinematic�x�i�L�l�}�e�b�N�j�Ƃ͓����Ă����Ԃł����ʂł���Ƃ����Ӗ��ł��B�����ʖ@�ɂ��ւ�炸�A��r�I�����P�`�Q�����̌덷�Ōv�����o���܂��B��������������܂��B
RTK�@�F����_�Ɗ�_�Ƃ̃f�[�^�̂���肪�K�v�ł��B
PPP�@�F��_���s�v�ŒP�Ƃő��ʂł��܂����A�덷�����邽�߂̏���M���K�v�ł��B
���ʌv�Z��@�����̈ʒu����肷��̂�4�ȏ�GPS�q������M�o����ꏊ�������`15���ʕK�v�ł��B�����ʒu�����͎��R�ɓ������܂����A��U�M����������ƍēx�����ʒu����肳���邽�ߑ҂K�v������܂��B�i�Î~�͕s�v�j

�����ʁi�����g�ʑ����ʁj���ĂȂɁH
���Ƃ���GPS���R�[�h�����i�M���R�[�h�������Ԃ��狗�������߂�����j�Ƃ��Đv����Ă��܂����B
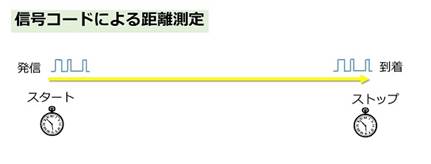
��L�}�́A�M�����B���Ԃ̌v���C���[�W�}�ł��B
���̌v�����@�ł͂P�O�����x�̌덷�������܂��B��萸�x�̍������ʂ̃j�[�Y������A�����ʖ@�͌ォ�甭�W���Ă����Z�p�ł��B
���@�́A�����g�̔g�`�̐��m�𐔂��邱�Ƃŋ����𑪗ʂ��܂��B
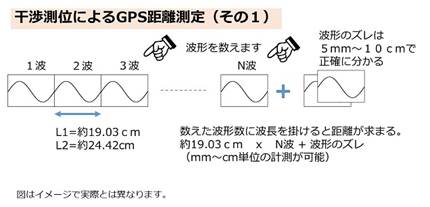
�����g�̔g�`���m�𐔂��邱�Ƃ͊ȒP�ł͂���܂���B�Ȃ��Ȃ�Ήq������̋������s���Ȃ��߂ł��B
�g�`�̃Y���i�ʑ����j�����ʼnq���܂ł̋���������ł���̂����ɕs�v�c�ł���ˁB
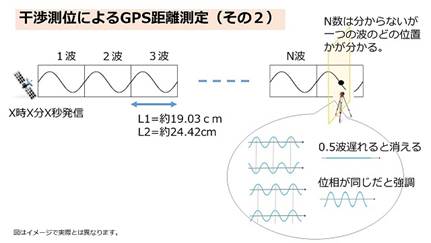
GPS���M�������琶�������g�Ɗϑ����ꂽ�g����������ƁA�g�̂ǂ̈ʒu�i�ʑ��ƌ����܂��j�ɂ���̂����킩��܂��B������N���i�g�̐��j�͕�����Ȃ��܂܂ł��B

��L�̐}�͈�̉q������͂����d�g�̃C���[�W�ł��B���ۂ͕��ʂł͂Ȃ����ʂœd�g���L����܂��B��L�}�́u���ʑ����v�Ƃ������̂��l�������̂ł��B
�͂��߂͉q�����牽�Ԗڂ́u���ʑ��ʁv�ɂ���̂�������܂���B�ł��������ԂŊϑ����ꂽ���ʒu���i�荞�ނ��ƂŁA�ǂ̋����́u���ʑ��ʁv�ɏ���Ă��邩�𐄑����܂��B
�ʏ�̐M���R�[�h�ɂ�鑪�ʂŁA���ɂT�O�����x�덷�ʒu�ɍi�荞�Ƃ��납��X�^�[�g�����ꍇ�A�O��P�O�O���ʂ͈̔͂łm�̌�₪��T�O�O�{�i���ۂ͖ʁj���邱�ƂɂȂ�܂��B
���L�͕�����₷���悤�ɓ��ʑ���2�����Ő��Ƃ��ĕ\�����܂��B
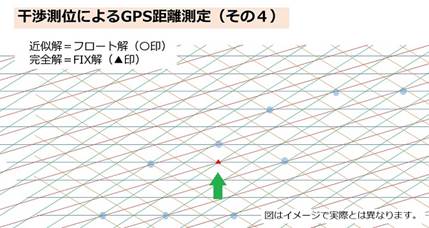
��L�́A�S�̉q������d�g����M���Ă���ꍇ�̌�_�����߂܂��B
�������ʒu���ԐF�����Ƃ��܂��B�S�̉q�����痈���d�g�œ��ʑ��ʁi���ۂ͋��ʁj�ɏ���Ă���Ƃ���ƂS�q������̓��ʑ��ʂ���v���Ă����_�ƂȂ�͂��ł��B
��_�����S�Ɉ�v����ꏊ��������Έʒu���m��ł��܂��B
���ۂ́A��_�������ɂ��ꂽ���_�i���ň�j������������܂��B�덷�œ��ʑ��ʂ��O�シ��\�������邽�߂����ɂ͌�₩��r���ł��܂���B
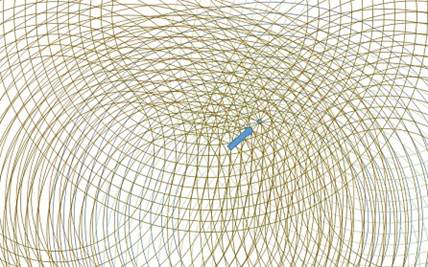
��L�C���[�W�}�ł��������q������̓d�g�Ō����i�荞��ł����܂��B�i�h�b�v���[���������p�j
���肷�邽�߂ɂ́A������(RTK�@�͖�P�`�P�T���A�X�^�e�B�b�N�@���ƂP�`�Q����)�̊ϑ����K�v�ɂȂ�܂��B
�܂���_�i�ʒu�����m�ȓ_�j������_�Ƃœ�����4�ȏ�̉q�����ϑ����Ȃ��ƋO����d���w�Ȃǂ̌덷����o�����ʒu�̍i�荞�݂��s���܂���B

��L�̐}�͕�����GPS�q������̈ʑ��ϑ��C���[�W�ł��B���Ԃ̌o�߂ƂƂ��ɉq�����ړ�����̂ʼnq�����������܂��o�ߎ��Ԃ���������N�����݂��₷���Ȃ�܂��B

L1�AL2�AL5�d�g��g�ݍ��킹�邱�ƂŊϑ����ꂽ�ʑ�����N���̍i�荞�݁i�ʒu���j��啝�ɑ��߂邱�Ƃ��o���܂��B���Ƃ��Ώ�L�̗�i�C���[�W�j�ł͂Q�̓d�g�̈ʑ��������Ɗώ@���ꂽ�ꍇ�A��₪1/4�ɍi���邱�ƂɂȂ�܂��B
��U�m����������������ƁA�ړ����Ă������̂Ȃ����m�ȋ��������A���^�C���ɕ�����܂��B�i�v�Z���͓���Ȃ̂ŏȗ��j
�g�A���r�M���C�e�B����h�H�H
GPS�֘A�����ŁA�����ʁi�����g�ʑ����ʁj�ׂ�Ƃ��Ȃ炸�o�Ă��錾�t�ł��BAmbiguity�i�A���r�M���C�e�B�j�͒�����u�����܂��v�Ƃ����Ӗ��ł��B�Ӗ��́A��LN���i�q�����牽�Ԗڂ̔g�����ʖ��F�����l�o�C�A�X�j�����肷�邱�Ƃł��B
���肷����@�͑�����Ă���Ă��܂����A����́u�����v���u���v�ł��B�i�����j���ׂ�͈͂������Ȃ�قǂɌ��_����������̂Ŏ��������܂�܂��B
N���͐����i�܂菭���_�ȉ��͂Ȃ��j�̂͂��ł����A�ŏ�����Y�o������o�����A�����l���܂��ߎ����������܂��B�i�ŏ����@�ɂ���t���[�g���ƌĂ�Ă�����̂ł��B�j
����ɍi���݁A�����l�����S�Ɍ��܂���i�t�B�b�N�X���ƌĂ�Ă��܂��B�j������ł���ΐ����Ȉʒu������ł��܂��B
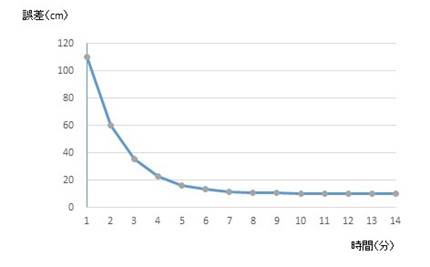
��L�O���t�͌덷�����Ԍo�߂Ŏ������Ă����C���[�W�ł��B�i���ۂ͂����Ɨ���Ă��܂��B�jRTK�@�ł��P�O�������x�̌덷�Ɏ�������܂Ő����`15���������Ԃ��|����܂��B�i������������30�b���x�ɒZ�k�\�j
�L�l�}�e�b�N���ʂ�RTK���ʂ��n���f�B�[GPS��X�}�[�g�t�H���Ɏg���Ȃ����R
❶�����g���v���Ɏg�������m�C�Y��}���`�p�X�i���˔g�j�Ȃǂ̉e�����₷��
❷�������Ɏ��Ԃ��|�����_��A���4�ȏ��̉q������M���Ȃ���Ȃ�Ȃ�
❸��U�M�����r�����ēx���������Ԃ��K�v�ɂȂ�
❹��_��10km�ȓ��ɕK�v�i���O�Ŋ�_��p�ӂ��邩�A�L���T�[�r�X�����p����B�j
❺���u�⍂���x�A���e�i�������ŃR���p�N�g���͓��
❻�����܂ł̑��ʃj�[�Y���Ⴂ�@�R�X�g������Ȃ�
GPS���@��20�N�ȏ㑪�ʂ̐��E�Ŏg���Ă����Z�p�ł����A�X�}�z��J�[�i�r�p�Ƃ��Ă͉ۑ肪���X����܂��B���݂��A��w���ƁE�����@�ւŌ�������Ă�����X���P���i��ł��܂����A�����_�ł́A�o�R��X�}�z�Ŏg����悤�Ȃ��̂ł͂Ȃ������ł��B

Google�Ō����������@�p�̃A���e�i�i�傫�Ȃ��̂������j
���Đ��{���͂����Ă����u�݂��т��v�Ƃ����v���W�F�N�g���������̂ŁA�܂Ƃ߂Ă݂܂����B���{�������ł͕������v���W�F�N�g���ƈ�ۂ��܂��B�Ƃ��낪�d�g�݂͐���������܂���B
�v�����Œ��ׂĂ��A�������ȒP�ɐ������鎑������������܂���B�قƂ�ǂ̕����A�u�݂��т��v������I�ȉq�����ƐM���Ă����邩������܂���B�����͈ȉ��ł��B
���V���q���u�݂��т��v�ɂ��āiQuasi-Zenith Satellite System�j
���̉q���̖����͈ȉ��R�i�@�⊮�A�A�⋭�A�B���b�Z�[�W�j�ł��B
���\�[�X�F��LURL�����AJAXA����
�@GPS�⊮�i�⊮�M���j
�V���߂���GPS�������邱�Ƃɂ�鑪�萸�x������ʂł��B�M���́A�č��f�o�r�ƌ݊��̂��̂���M�o���܂��B��GARMIN etrex10,20,30���͉p��ŁE���{��łƂ��Ɏ�M�\�B
��ʓI�ɓV���t�߂͎Ձi�������j����̂����Ȃ����ߎ�M�m�����オ��܂��B�������A�P��GPS�q���������邾���ł��B
iPhone���u�݂��т��v����M�o���邩��ƌ����Ă�1���₃���܂Ő��x���オ���ł͂���܂���B�r���̒J�ԂŁA�Q�O�`�W�O���̌덷�������Ă������̂��{�����덷�P�O�����x�ɖ߂������ł��B
�g�ѓd�b���X���ňʒu���x����r�I�ǂ����R�́AWi-Fi�ABluetooth�A�g�ъ�n�ǁi�g�т̓d�g�j�ɂ��ʒu��ɂ��W������܂��B
�܂��i�����j�Ő��V�h�ł���r������Ε�����܂����A�݂��т����x�͎��́u���V�A�̉q���O���i�X�v�̌��ʂł���\���������ł��B
�ʂ̃f�[�^�ł����A�o�ώY�Ə��̃y�[�W�ɂ���A����28�N3��18���q�����ʊ��p�����R���\�[�V�A��������P38�ɂ��ƁA������ӂ̕⊮���ʂ́A�덷10.82���Ƃ���܂��B
�AGPS�⋭�i�⋭�M���j
����킵���ł����A�⋭�ɂ͉��L2�̃T�[�r�X������܂��B
A)�@�w�T�u���[�^�����ʕ⋭�T�[�r�X�x
B)�@�w�Z���`���[�^�����ʕ⋭�T�[�r�X�x
�@�@
A)�w�T�u���[�^�����ʕ⋭�x
SLAS�iSub-meter level augmentation signals�j
�P�`�R���덷����ŁA���������T�[�r�X�ł��B
�����L1S�܂���L5S�������{�Ǝ��̐M�����g���܂����A�]����GPS�ł̈ʒu��Z�p�ł���DGPS���������Ă���̂ɉ߂��܂���B�v������u�Ђ܂��v�Ɠ��l���f�B�t�@�����V��������w���A���łɃT�[�r�X����Ă���SBAS�Ƃقړ������e�ł��B
�c�O�Ȃ���]����GPS���V�[�o�ł͎�M�o���܂���B
SBAS�ƈႤ�_�́A�V���ԗL����GPS�p��QZSS�p�̋O�����i�G�t�F�����X�j��z�M���邱�ƂŃ��V�[�o�d���I�������ۂ̑��ʑ��x�𑬂߂�H�v�ł����A�g�т�X�}�z��A-GPS�Ƃ����d�g�݂����ɂ���܂��B
QZSS���M���ꗗ���݂��L1S�Ƃ͕ʂ�L1Sb�Ƃ����M��������܂��B����L1Sb��SBAS���S�݊��M���ł��B�iGARMIN�Ŏ�M�o����\��������܂��B�������u3���@�v�Î~�q������̂ݔ��M�ł��B�j
|
�M�� |
L1Sb �i�R���j |
L1S�AL5S �i2���A�S���j |
|
���x�P |
�Q�`�R�� �i��B��[�Ȗk�j |
�P�`�Q�� �i�������ݒn�j |
|
���x�Q |
�V�� �i��B��[�ȓ�j |
�Q�`�R�� �i���{���Ӂj |
|
DGPS� |
�~ |
�Z |
|
�����(fast correction) |
�Z |
�~ |
|
�����(long-term correction) |
�Z |
�~ |
|
�d���w� |
�Z |
�~ |
|
�O�������\�� |
�~ |
�Z |
|
SBAS�݊� |
�Z |
�~ |
�����@�̃T�u���[�^����M���́A�wL1-SAIF�x�ƌĂ�Ă��܂����B2015�N7�������wL1S�x�ύX����A�d�l���C������܂����B�i�����TP�j
��LL1Sb��DGPS����g�~�h�ł����A�]����SBAS(MSAS)��DGPS���́A�d���w��ƁA������i�������ƕω�����q���̋O�����ƃN���b�N�덷�ɑ����l�B�j��������i�ω��̑����N�x�̒Z�����j�Ƃ��Č덷������v�f���ɕ������Ĕz�M����Ă��܂������e��DGPS����ł��B
�i�덷��v�f�ʂɕ������@�́A���p���SSR�uState Space Representation�v��ԋ�ԕ\���ƌĂ�܂��B�����j�@
���ӓ_�F��M�q���������Ȃ��ADOP�i�q���z�u�ɂ�鑪�ʐ��x�̒ቺ���j�������ꏊ�i�X�т�[���J�̒��A�����r���̒J�ԂȂǁj�́A�⋭�M��L1S ��������L5S�i��Differential GPS���j����M���Ă����x�͉��P����܂���B
L1S��L5S�M���ɂ��⋭�́AGNSS�q���𑽂���M�o����ꏊ��DOP�ɂ��덷�����Ȃ��ꏊ�ł̂��ʂ����ҏo���܂��BL1S��M�o����ΐ��1m���x�ɂȂ�Ƃ������̂ł͂���܂���B
�Q�O�Q�P�N�P�����_L1S�M������M�o������̂́A�܂������ł��B����ȊO�̓��W���[���������̓A���e�i�ł��B�����@�܂��A�݂��т�������Web�T�C�g��L1S��M�̓o�b�e���[������������߃X�}�[�g�t�H���Ȃǂ�z�肵�Ă��Ȃ��ƋL�ڂ���Ă��܂��B
B)�w�Z���`���[�^�����ʕ⋭�x
�����덷�⋭�ɂ��Ă��������܂��B
���̃T�[�r�X�́ALEX(L-band experiment)=L6�Ƃ���1278.75MHz�̎��g���M�����g���܂��BJAXA�̎����ł́A�u���BGalileo�q����E6�M���Ƒ��݉^�p����L���B�v�ƂȂ��Ă���܂��B
���̂����덷��͎��́A2�̃T�[�r�X�i������p�@�b�k�`�r�@�Ɓ@�C�O�ł��g�����A�l�`�c�n�b�`�j���݂�܂��B
L6�M���\���i�����j
|
�M���� |
���b�Z�[�W�� |
�p�r |
|
L61 |
L6D |
CLAS�p |
|
L61 |
L6D |
�s�� |
|
L62 |
L6D |
CLAS�p |
|
L62 |
L6E |
MADOCA�p |
�@�b�k�`�r�FCentimeter Level Augmentation Service�@���@���������T�[�r�X
1���@�ł��q�����ʗ��p���i�Z���^�[�iSPAC�j�Ƃ����g�D��CMAS�Ƃ������O�̃T�[�r�X���J�n���Ă��܂����B�J���͎O�H�d�@������Ђ��S�����A�q��Ђ̎O�H�X�y�[�X�\�t�g�E�F�A�������J�����Ă��܂��B
2���@�ȍ~����CMAS��CLAS�Ƃ������̂ƂȂ�܂����B�ύX�_�͒ʐM�t�H�[�}�b�g�����ۋK�iRTCM�����ƂȂ�܂����B���܂�LEX�ƌĂ�Ă����M�����́AL6�M���ɖ��O��ς��܂����B
�Z�p�I�ȑ��ʎ�@�́APPP-RTK��������RTK-PPP�iPrecise Point Positioning�j�ƌĂ�Ă�����̂ł��B�����𗝉����邽�߂ɂ́A���߂�RTK�@�Ƃ͉�����������Ȃ���Ȃ�܂���B
��L�͏]����RTK�@�̃C���[�W�}�ł��B
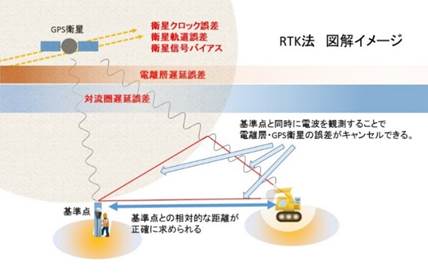
GPS�iGNSS�j���痈��d�g�͓d���w�x����O���덷�ȂǗl�X�Ȍ덷���܂݂܂����A���@�i�����g�ʑ����ʁj���g����_����M�@�������ɓ���GPS�d�g���ϑ����邱�ƂŊ�_�Ǝ�M�@�����ΓI�ȋ����ɂ����Ă͌덷�����E�ł��A�P�����P�ʂŐ��m�ɋ��߂邱�Ƃ��o���܂��B
�n�ʂ���̐�Έʒu�͌덷���傫�������Ă��܂����A��_�̈ʒu�����m�Ȃ̂ŁA��M�@�̈ʒu�������P�ʂŖ��m�ɂ��邱�Ƃ��ł��܂��B
���@�́A2�����ȏ�œ�����4�q���ȏ�̊ϑ����K�v�ł��B�܂��ʒu�̖��m�Ȋ�_���P�O�����ȓ��Ɏ��O�ŗp�ӂ���K�v������܂��B�i���ꂷ����Ɠd���w�덷���ς�邽�߂ł��B�j���A���^�C���Ɉʒu������o�����߂ɂ́A��_�ƌv���_�Ƃ̃f�[�^�ʐM�i������d�b���j���K�v�ł��B
PPP�@��RTK�̌��_�ł������ǂ���P�O�����ȏ㗣�ꂽ�ꏊ�ł��A���@�i�����g�ʑ����ʁj���g���������ȑ��ʂ��o����悤�ɍl���o���ꂽ���@�ł��B�i�����j
������RTK�@�Ɣ�r����ƁA���������Ԃ������Ƃ����傫�Ȍ��_������܂��B���̌��_���������ׂ�RTK��PPP�̗��_��Z�����������@��PPP-RTK�@�ƌĂ�Ă�����̂ł��B
RTK-PPP�@�̃����b�g�Ƃ��Ă���_���s�v��RTK�@���݂̐��x�����������Ԃ��Z�����Ƃł��B�i�����j
�d�g�݂͉��L�Ő������܂��B

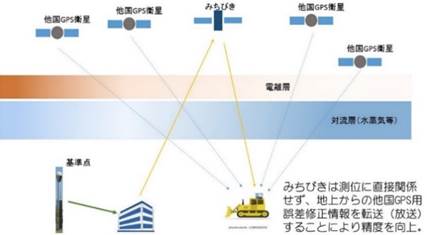
RTK-PPP�@�́A�܂��O�i�K�Ƃ��Ēn��V�X�e�����ŊeGPS�iGNSS�j�q���̋O���덷�A���v�덷�A�܂��d���w���܂���C�덷����d�q��_����ϑ����܂��B
GPS�q�������M���Ă����G�t�F�����X�ƌĂ��O�����i������j�̓��[�g���P�ʂł̌덷���܂݂܂��B�i�n������̂킸������C���n�\�����ɂ��d�͕ω��A���z�⌎�̏d�͂ɂ���������A���z���Ȃǂ̉e���ŋO�����\���v�Z�O������Y���邽�߂ł��B�j
�ϑ����ꂽ�덷�C�������A�u�݂��т��v�ɑ��M���A�u�݂��т��v����S����L6D�M�����g���z�M�i�����j���܂��B
��M�@���́u�݂��т��v�o�R�œ���ꂽ�덷�C���������ƂɁAGPS�iGNSS�j���g�������@�i�����g�ʑ����ʁj�Ŏ����̐��m�Ȉʒu��m�邱�Ƃ��ł��܂��B

�T�[�r�X�͈͂����{�����̂��ŁA�A�W�A�E�I�Z�A�j�A�̓J�o�[����Ă��܂���B(����)
�܂��c�O�Ȃ���A���̐��x��RTK���ʕ��݁i�P�`�Q�����j�ł͂���܂���B�����炭L6D�ʐM���x�ɂ�鐧��̉\��������܂��B�i�����ł��B�j
GPS�q�����g�����������x���̐������ʂ͗��j�������A1994�`2002�N�ɂ͍��y�n���@���S���d�q��_�����ς݂ŁA���ɑ��ʂɗ��p����Ă���A���ɖڐV�����Z�p�ł͂���܂���B
���y��ʏȍ��y�n���@�ō�ƃ}�j���A�����f�ڂ���Ă��܂����A2002�N�ȍ~�A�Ǝ��Ŋ�_���������A�l�b�g���[�N�o�R�œd�q��_����������������l�b�g���[�N�^RTK-GPS�����Ƃ��ĊJ������A���p���L�����Ă��܂��B�i�����j�@�i�����Q�j
�u�݂��т��v�͊�ǂ���P�O�����ȏ㗣��Ă����@�ɂ�鐸�����ʂ��o����悤�ɕK�v�Ȍ덷��f�[�^���q���ő��M����d�g�݂ł��B�c�O�Ȃ��������ʁi�����g�ʑ����ʁj���s��Ȃ��A��ʃJ�[�i�r���X�}�z�Ƃ������̂��̂ł��B
�A�l�`�c�n�b�`�FMulti-GNSS Advanced Demonstration tool for Orbit and Clock Analysis�@���C�O�ł��\�ȃT�[�r�X
���V���q���i2���@�ȍ~�j��L6E�M�����V�����lj�����܂����B�S���́A���������J���@�l�F���q���J���@�\�iJAXA�j���s���Ă��܂��B���̃T�[�r�X�͂܂����؎������̂��̂ł��B�i�Q�O�Q�P�N���j�i�O�̂��߁FSPRING8��MADOCA�Ƃ͖��W�ŕʕ��ł��B�j
�����Fhttps://qzss.go.jp/overview/information/madoca_171206.html
��{�I�Ȍ����́APPP-AR�ƌĂ�Ă�������ł��B�ȒP�ɐ��������RTK�@�Ɠ��l�������ʁi�����g�ʑ����ʁj�ʼnq���Ƃ̋������v�Z���܂��B
CLAS�i���������j��PPP-RTK�@�ƈႤ�_�́A�e�n����d���w���Η����̒x���f�[�^�������܂���B�i�ʐM���x�̊W�őS�Ă̒n���M������B�j���̂�����M�����d���w�E�Η����x���̕���s���K�v������܂��B
��M���ł̓d���w�̕���@�́AL1,L2,L5�d�g���g���œd���w�̒ʉߎ��ԂɈႢ�����邱�Ƃ𗘗p���܂��B���̂��ߍŒ�L1,L2,L6���̂R���g��M����@�킪�K�v�ł��B
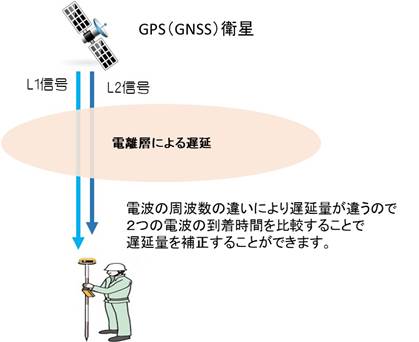
�i��L�͓d���w��C���[�W�}�ł��B�@L1�M����L2�M���͓d���w��ʉ߂��鑬�x���Ⴂ�܂��B�������ԍ�����d���w�x���ʂ𐄑�������܂��B�j
�Η����x���͓K�ȗ��_���ɂ�萄�肵����܂��B

�i��L�͑Η�����C���[�W�}�ł��B�q���̌�����p�x�Œʉ߂����C�̗ʂ��قȂ�܂��̂Ő��l���f���őΗ����x���ʂ𐄑�������܂��B�j
PPP-AR�����́A�e�n��ʌŗL���i�܂�d���w���Ȃǁj�𑗂�Ȃ��̂ŁA�A�W�A��I�[�X�g�����A�ł����̃T�[�r�X�����p�ł��܂��B�������Ȃ���A��M���œd���w�x���덷�����邽�߂ɂ́A�����x�A���e�i���M�@�ւ̕��S�������A�R�X�g���Z�p��Փx���㏸���܂��B
�܂������_�ł����������Ԃ������_���f�����b�g�ł��B
MADOCA�̐��x�́A�P�O����������ڎw���Ă��܂��B����ɂ��Ă����̂����{��̐����T�C�g��������܂���B����
�w�Z���`���[�^�����ʕ⋭�x�̗p�r�́A���@�i�����g�ʑ����ʁj�����߃��V�[�o���̑��u�������ƂȂ��_�@�������s�A�Ôg�Ď��u�C�A��^�y�؋@�B����A�ԗ��������s�Ȃǂ̗p�r�������܂��B�X�}�[�g�t�H�����n���f�B�[GPS���^�[�Q�b�g�O�ł��B
L6�M����M�@�́A2021�N1�����_�łW�В��x����܂��B�ihttp://qzss.go.jp/usage/products/list.html�j
���i��͎c�O�Ȃ�����J����Ă��܂���B
�F���܂��łɂ��C�Â���������܂��A�u�݂��т��v�͉q���������Ȃ����ߑ��ʂɒ��ڊW�����A����GNSS�q���Ƃ̑��ʌ덷�C�����߂̏�����Ă�����������q���ƌ����܂��B
���[�^�[���A�Z���`���[�^���̃��A���^�C�����ʂ́A����GPS(GNSS)�����ł͐��藧���Ȃ����Ƃ��������ł��邩�Ǝv���܂��B
�f�o�r�ʒu���x�����コ���邽�߂ɕK�v�Ȃ��Ƃ́A�[�����i��M���j�Ŋ����ʁi�����g�ʑ����ʁj���s�����Ƃł��B
���̂��߂ɂ́A�덷��f�[�^�i�⋭���j���s���ł����A���́A�⋭����z�M���邾���ł�������ȃ��P�b�g�Ől�H�q����ł��グ�Ȃ��Ă��A�X���ł͌g�ѓd�b�ł��\���Ȃ̂ł��B
����MADOCA-PPP���؎����ł́ALEX�M���Ɠ��������C���^�[�l�b�g�o�R�Ŕz�M�BP10����Ă��܂��B�i�����j
�u�݂��т��v�̌덷�U�����͖{���H�H
CLAS�i��CMAS�j�̐��x�ł����Ahttps://sys.qzss.go.jp/dod/report/clas.html�ɂāA6�������ɖ����̐��x�����\�����悤�ł��B
���Q�l�܂ł�2020�N�㔼���̐��\�͈ȉ��ł��B
��L�́u�Î~���v�ł̐��x�ł��B�������������x�icm�j�A�c�����������x�icm�j�ł��B�ԍ��i�F�j�͏ꏊ���w���Ă��܂��B��܂��ɂ͂P�����`�R�����Ɏ��܂�܂����A���ɂ���Ă͐����łT�����A�����łX��������ꍇ������܂��B
�G���A�ԍ��́A���L�}�����Q�Ɖ������B�i�P�Q�Ԃ͏ȗ����Ă��܂��B�j

�����Ď����A���p�I�ȁu�����Ă���v�ꍇ�̐��x�ł��B
�����������icm�j�A�c���������icm�j�ł��B�����ł͂S�����`�P�O�����Ɏ��܂�悤�ɂȂ��Ă��܂����B�ŋߌ��I�ɐ��x�͌��サ�Ă��܂��ˁB�������P�Q��������ꍇ������A��Ɉ��肵�Đ��x���o�Ă���Ƃ͌����܂���̂ł����Ӊ������B
�u�݂��т��v��GPS�iGNSS)���D��Ă���Z�p�I�ȓ_������ȋO�����f�[�^���k�uCompact SSR�v�Ή������������T�[�r�X�iPPP���ʁj�ɑΉ����Ă���Ƃ������̂ő��ʋZ�p�͏]���̂��̂ƂقƂ�Ǖς�肠��܂���B�i��f�[�^�͊m���ɂ��肪�����ł����A����ȑ��u���K�v�ŁA�N�ł���M�o������̂ł͂���܂���B�j
�C�O��GNSS���ߑ㉻���Ă��荷�ʉ�������ƂȂ��Ă��܂��B�i������A���^�C���Ȍ덷�C�����́A�����ʁi�����g���ʁj���s�����p�҂ɂƂ��ẮA�M�d�Ȃ��̂ł��B�ł��]���̎R���łȂ�������q���݂��т����g��Ȃ��Ă��l�b�g�o�R�Ŏ�M�\�ł��B�j
�݂��т��̕K�v��http://qzss.go.jp/overview/services/sv02_why.html�ł����A���V���̃����b�g�����������͕č�GPS�Ƃ̔�r�݂̂ŋL�ڂ���Ă��܂��BGLONASS�AGalileo���܂߂�Ə��V���ł̑��ʂ͐��x�̈��萫�ɂ͂��܂�e��������܂���B
�݂��т��̗D�ʐ��́Ahttp://qzss.go.jp/technical/technology/tech02_superiority.html�@�ɋL�ڂ���Ă��܂����A�w�����ɓd�g����M�ł���q���������āA�����x�ň��肵�����ʂ��\�ɂȂ�A����덷�����炷���Ƃ��ł��܂��B�x���⊮�M���̂��Ƃ̂L�ڂ���Ă��܂��B
�B���b�Z�[�W�@�\
���ʂƖ��W�Ȃ̂ŏȗ����܂��B�ЊQ���̕����⑊�ݒʐM�ɗ��p����v��ł��B�i�����j�@��M�o����@�킪���������݂��܂��B(2022�N2�����)
https://qzss.go.jp/usage/products/dc-report.html
1���@�A2���@��4���@���w8�̎��O���x�ŁA3���@���w�Î~�q���x�ƂȂ�܂����A�݂��т��̑傫�ȓ����̂ЂƂA�W�̎��O���͒n�\������ۂǂ̂悤�Ɍ�����̂ł��傤���B

��L�͐V�h���猩���ꍇ�́u�݂��т��v���V�~�����[�V�����iGNSS View�Ŋm�F�j���Ă݂܂����B��L�̓C���[�W�ő����قȂ邱�Ƃ͂������������B��w�r���Q����S�`5���ԂœV���t�߂ɏ���8���ԂقǓV���t�߂ɗ��܂�A��S���Ԃŏ����Ă����܂��B�i����ł͂�������܂���j

��L�͐Ί_���ł̃C���[�W�}�ł��B�������ɂ͒��܂��W�̎������S�Ɍ����Ă��܂��B�V���t�߂ł͐^���ʂ炸���ɏ�������܂��B�i�O�����菑���Ȃ̂Ŏ��ۂƈقȂ�܂��B�j
��L�́u�݂��т��v�̋O���̍����������Ă��܂��B�I�[�X�g�����A�t�߂ł́A�Î~�O�����Ⴂ�i�߂��j�ł������{�t�߂ł͐Î~�O����荂���i�����j����ʂ�܂��B�O���̍����������Ȃ�ƃX�s�[�h�_�E�����āw���V���x�ł̑؍ݎ��Ԃ�������ʂ�����܂��B
���{�t�߂ł͕č�GPS�O���̖�2�{�̍����ƂȂ邽�߁A�č�GPS��苭���d�g���o���K�v������܂��B
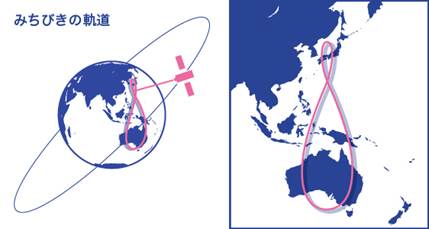
�u�݂��т��v���z�[���y�[�W�ł́A�O���̖͎��}����L�ƂȂ��Ă��܂����q�����n���ɋ߂����܂��B�i����������܂��B�j���̉e�̕t�����O��������ƁA�q���̓I�[�X�g�����A�t�߂Œn�����ɒ��ނƍl����l�������̂ł͂Ȃ��ł��傤���B
���ۂ�3.2������4���L�����[�g�����Ƌ����I�ɂ͂����炭���L�̂悤�ȃC���[�W�ɂȂ�͂��ł��B
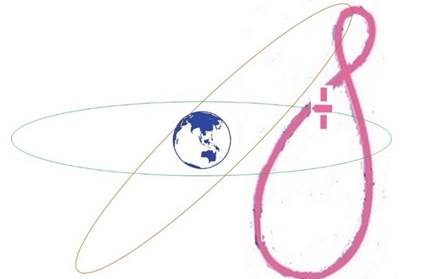
�ܓx�ɂ����܂����q���͊��S�ɂ͒n�����ɒ��܂��A���肬��n��������܂��V���t�߂ɖ߂�܂��B�i��L�}�͋O���̍������琄�������z���}�ł��̂Ŏ��ۂƂ͈قȂ邱�Ƃ������������B�j
�u�݂��т��v�̗��̖����Ƃ��ė����~�T�C�����ˊĎ��Ȃ���@�q�����p�ƍl������������܂����A���{�t�߂ł͐Î~�O����荂���O���i��ʓI�Ȓ�@�q������100�{�ȏ�̍����j�̂ŕs������������܂���c�B
�s���ȐM���@������p�T�[�r�X
�����ɂ��L�ڂ���Ă��Ȃ�PRS_L6R�Ƃ������{��p�H�M��������܂��B�i�L�ڏꏊ�j
PRS/L6R�M���Ɛ�������Ă��܂����A�����_�ł̓l�b�g��ł͈�،��J����Ă��܂���B�i2021�N2���j
PRS�Ƃ�Public Regulated Service�i�����K���T�[�r�X�j�̂��Ƃł��傤���H
���Q�l�܂łɁAEU�K�����I�̌����K���T�[�r�X�iPRS�j�́A�x�@�A���x�����A���{�֘A�c�̂ɂ���Ďg�p�����Í������ꂽ�T�[�r�X�ł��B
�u�݂��т��v�̐��x�܂Ƃ�
|
���Ґ��x |
|
|
�⊮�M�� �i�f�o�r�݊��M���j |
�P�O�� ���x |
|
�⋭�M�� �i�T�u���[�^���j �r�k�`�r |
�P�`�Q�� ���x |
|
�⋭�M�� �i�T�u���[�^���j �iSBAS�݊��M���j |
�Q�`�R�� ���x |
|
�⋭�M���������p�� �i�Z���`���[�^���j �b�k�`�r ���@ |
�T�`�Q�O���� ���x |
|
�⋭�M�����C�O�� �i�Z���`���[�^���j �l�`�c�n�b�`�@(CLAS-E?) ���@ |
�U�`�T�O���� ���x |
�u�݂��т��v��M�ł���@����u�⊮�M���v�����̂��Ƃ��w���Ă���@�킪�命���ł��B���Z���`�̌덷�ɂȂ�Ƃ����̂��傫�Ȍ���ł��邱�Ƃ��킩��܂��B
�u�݂��т��v�̉ۑ�
����ސ�`�������i�����H�j����܂������A�Љ��GPS���[���Z�����Ă��邽�߁A������GPS�݊��q���������@�����������ł��܂��B�܊p�\�Z�𓊓������q���Ȃ̂ŐϋɓI�Ɋ��p���������̂ł����A���̊��p�Ɍ����Č��O�_�Ɖۑ���܂Ƃ߂Ă݂܂����B�i�����ł��B�j
�P�j�T�u���[�^���⋭�M����M�@�̕��y�@
���{�Ǝ��̕⋭�M��L1S�M���i��DGPS�M���j����M�o����X�}�z��J�[�i�r�A�܂��n���f�B�[GPS�𑝂₷�K�v������܂��B�P�ɂ݂��т���L1C/A�iGPS�݊��M���j����M����@���́u�݂��т��v����M�������ƂɂȂ�Ȃ��悤�ɁA���ʉ����ׂ��ł��B
�Q�jL6�M���i��LEX�M���j���x����@
�����_�ł́AL6D�M���́A�Q���������̑��x�ł��B����͗\�Z�̊W����̐�����������܂��A���@�i�����g�ʑ����ʁj�̐��x�𗎂Ƃ��Ă��錴����������܂���B�i�����ɂ�鎄���ł��B�j�v�擖���ł͂P�lbps�̑��M���[�g�ŕ���𑗐M����Ă��������悤�ł��B�i����P48�j
QZSS���d�l�ł͌덷���Î~���͂U�������x�A�ړ����ł͂P�Q�������x�ƂȂ��Ă���܂��B�Ȃ̂ŁA�J�[�i�r��X�}�z���P�O�`�R�O�����������ƂƔ�r�����w�����ׂ������x�x�ƌ����Ă���l�������܂����A�y�،��z�E���݂Ȃǂ�RTK���ʐ��Ƃ��炷��Ƃ����炭�w�c�O�Ȑ��x�x�ƂȂ�܂��B�U�������ƑO�㍶�E�ɐÎ~���ő�P�Q�����A�ړ����Ă���ƍő�Q�S�����U���\��������܂��B
�y�،��z�A������y�n���L�o�L�A�y�Η��ЊQ�Ǘ�����l����ƂP�Q�����ȏ�̐U��ł͖��ł��B�]��RTK���ʂōs���Ă���P�`�Q�������x�̐��x�͗~�������ł��B���z��10k�`100kbps����Γ��{�S�y���J�o�[����L��l�b�g���[�NRTK�T�[�r�X���s����悤�ł��B�i�S���̍��x�ȕ����ԗ�����ƌv������n��ɖ��W�ȑ��������ʐM�������A�ʐM�̖��ʂ������܂��B�j
�Q���@�ȍ~��L6D�M�����Q�`�����l���iD1,D2�j�ɑ����Ă���̂Ŋ��҂ł��邩������܂���B�i�����j
�i�Q�l�F���{�̓t�B���s���C�v���[�g�Ƒ����m�v���[�g�ɉ�����Ă���A�N�Ԑ��~�����琔�Z���`�ړ����Ă��܂��B�܂��n�k�ɂ��n�k�ړ����p�����Ă���܂��B���x���ǂ��܂ŋ��߂邩�͗p�r�ƃR�X�g�������ɂȂ邩�Ƃ͎v���܂��B�j
�R�j�ғ����i�A�x�C���r���e�B�j�@
�d�l�ɂ����T�u���[�^�\���⋭�T�[�r�X�́A�p60�x�ȏ�i�܂荂���ʒu�j�̉q�����瓾����L1S�M���� unhealthy�i�܂�̏�j�ł͂Ȃ��m�����u0.92�ȏ�v�ƂȂ�܂��B�ƂȂ��0.08�͒�~���Ă���\��������܂��B�v�Z�ł�1��24���ԂŖ�2���ԁA1�N��700���ԁi1�����߂��j���~�܂�܂��B�����v�Z�ԈႢ�ł��傤���H

������QZSS�����c�C�b�^�[���\��Unscheduled Outages�i�v��O��~�j���������Ă���C�ɂȂ鏊�ł��B��L��2020�N�̏W�v�ł��B�i�f�[�^���A�����j
��L��2021�N�̏W�v�ł��B
NAQU����ɂ��ƁA�����^�p�J�n��L1S��L6�M�������ƒ�~���Ă��܂��B���p�҂�QZSS���T�[�r�X��~�����邱�Ƃ�O��ɗ\�h�[�u���s�������i�����K�v�ł��B�����ɌW��V�X�e���͓��ɒ��ӂ��K�v�ł��B
�S�jL6��M�@�̃R�X�g
�ቿ�i�ō����\�A�����삪�ȒP�Ȃ��̂��]�܂�܂����A�R���f�B�e�B�[���i�i�ቿ�i���i�j�́A�e���[�J�[�Z�p�͂��K�v�Ȋ��ɗ��v�����Ȃ����߁A����o���ɂ����Ƃ����ł��B
�ő�̖��́A�w3���g�A���e�i�̊J���x�̂悤�ł��B
�u�݂��т��v�����p����邩�ǂ����́A���@���ʂ��s�����M�@�{�A���e�i�̒ቿ�i�����L�[�ƂȂ肻���ł��B
GPS�i�ĉq���j�̋ߑ㉻�ɂ���
GPS�q����1978�N�ɑł��グ��ꂽ��A�������P�i�ߑ㉻�j���s���ė��܂����B
���u���b�N�͐���������܂�
�i�u���b�NI �j1978�N�`1985�N �v���g�^�C�v
�i�u���b�NII �j1989�N�`1990�N�@L1C/A�����M��
�i�u���b�NIIA �j1990�N�`1997�N
�i�u���b�NIIR �j1997�N�`2004�N �ߐډq���ԒʐM
�i�u���b�NIIRM�j2005�N�`2009�N ������L2C���p�M���A������l�R�p�M��
�i�u���b�NIIF �j2010�N�`2016�N ������L5���p�M��
�i�u���b�NIII �j2020�N�` ������L1C���p�A2020�N����ł��グ�J�n
GPS�q���̎����͒Z���A5�`15�N�ʂł����V���������q������V�����@�\���t������Ă��܂��B���ڂ́AL2C�M���AL5C�M���AL1C�M���AM�M���̒lj��ł��B
L2C�M�� �ˌR��p�ł�����L2���g�������Ԃ֊J���ƂȂ�܂����B
L5C�M�� �˓����́A�}���`�p�X�i�d�g�̔��ˁj�ɋ����_�ƃf�[�^���̏��Ȃ��R�[�h�ւ̉��P�ł��B
L1C�M�� �ˏ]����L1C/A�M���Ƃ͓������g���ŋ������܂����A�S���ʂ̐V�������ԗp�M���ł��B�@�č��́A2020�N����ł��グ�J�n�A2020�N��㔼��24��GPS�q���ŗ��p�\�\��Ƃ̂��Ƃł��������x��Ă��܂��B
�l�R�[�h��������̌R�p�M���F�]���̌R�pP�R�[�h�iY�j�R�[�h�̒u�������\��ł��BL1M�M����L2M�M��������2018�N����{�i�I�ɉ^�p���J�n����Ă���悤�ł��B�W�Q��T�C�o�[�U���ւ̑ϋv�������߂Ă���܂��B�܂��������GPS�^�p����V�X�e���iOCX�j�Ƃ̐������������v����Ă��܂��B
L1C�M���̑�\�I�ȓ���
❶GPS���K�V�[�M���iL1C/A�j�Ɠ������g���Ȃ̂Ŏ�M����r�I�e�ՁB
✓�g�U�������H�v���邱�Ƃŋ���L1C/A�M���Ƌ����Ɖe���z���B
❷GNSS�M���Ƃ̌݊������d��
✓�܂��K�����IE1C�M���Ƃ̌݊����B
❸L2C��L5C�̉��P�������p��
✓�ŏ��ʒu����܂ł̎��ԁiTTFF�j�Z�k�̍H�v�B
✓�o�͂������B���m�C�Y��}���`�p�X�ɋ����B
✓�O���������qFEC�r�̎������m�C�Y����
✓�T�ԍ����P�Łu�[�����A�v��2137�N�܂Ŗ�����
✓�S�p�P�b�g�ɃA���[�g�t���O�t���i��Q��12�b�ȓ��ʒm�j
✓�p�C���b�g�L�����A�ł̃g���b�L���O���P
❹���b�Z�[�W�\����L2C�Ɨގ����Ă��܂����ACNAV-2�ƌĂ�Ă��܂��B
✓NAV���P�W�������e�q������̋O������z�M�B
❺������L1C/A�i���K�V�[�M���j�̒u�������ƂȂ�\��ł��B
�i�č��őS�Ă�GPS�q������������܂ł��ƂP�O�N�|����܂��B�j
�c�O�Ȃ���2020�N3������GPS�ߑ㉻�M��L2C�AL5C�AL1C����M�ł��������GPS���V�[�o���قƂ�ǂ���܂���B
EU��GPS�uGalileo�v
���[���b�p��GPS�ƂȂ�uGalileo�i�K�����I�j�v��2016�N12��15������S���E�ŗ��p�\�ƂȂ�܂����BGalileo�͉��B�����̂̎哱�ɂ��A17�N�̍Ό���53�����[�����̋���������邱�ƂŃV�X�e���\�z���i�߂��Ă������̂ł��B2016�N12��18�@��2018�N�܂łɑS21�@�ł��グ�������܂����B2020�N���_��26�@�ł��B
���łɋߑ㉻�M��(E1C)���x�[�X�ƂȂ��Ă���A�č�GPS�Ƃ�L1C�M���Ō݊���������܂��B�iL1C��E1C�͌݊������� ���č��̑ł��グ��GPS III�����2020�N�ɊJ�n����2029�N?�܂ł�24��GPS�q���ŗ��p�\�\��j
�܂��AE5a��L5�i�č��A���{�A�C���h�j��B2a�i�����j�Ō݊���������܂��B
���L���g���Ŕ��M���Ă��܂��B
|
�o���h |
���S���g��[MHz] |
�M���� |
�T�[�r�X |
|
E1 |
1575.42 |
L1B�AE1C(=L1C) |
OS�ACS�ASOL |
|
E1�AE2 |
PRS |
||
|
E5 |
1191.795 |
E5a(L5C)�AE5b |
OS�ACS�ASOL�iE5b�j |
|
E6 |
1278.75 |
E6b |
CS |
|
E6a |
PRS |
https://de.wikipedia.org/wiki/Galileo_(Satellitennavigation)
http://galileognss.eu/galileo-frequency-bands/
�M�����͏����������܂����A�ʏ��E1C�i��L1C�j����ʌ����̐M���ł��B
�T�̃��[�U�ɉ������T�[�r�X���
OS�iOpen Service�j��ʗp�i�����j
CS�iCommercial Service�j�L���̏��p�T�[�r�X�A�Í���
SoL�iSafety-of-Life Service�j���ԍq��E�C���p
PRS�iPublic Regulated Service�j���{�@�ցA���p
SAR (COSPAS-SARSAT)�@�{���~���T�[�r�X
�����_�i2017�N1���jGARMIN�ł͎�M�o���܂���B�������̐M���iE1C=L1C�j��SBAS�M������M�ł���A�č�GPS�A���V�AGLONASS�ƍ��킹��ƒJ�Ԃł̐��x���e�i�ɗǂ��Ȃ�͂��ł��B
Galileo�i�K�����I�j�̈ʒu���x�@
�I�[�v���T�[�r�X�iOS�j�̏ꍇ�A�P����g���iSF�j�łP�T~�R�O���@��d���g���i�d���w����ʂ���H�j�̏ꍇ�łS~�W���ł��B
E5b ��������E6 �Łu�݂��т��v�Ɠ����悤��PPP-RTK���g����悤�ł����A�ڍוs���ł��B ���x�͂����炭�u�݂��т��v�ƕς��Ȃ������P�O~�U�O�������x�Ɛ��@����܂��B�i�����ɂ��傫���قȂ�l�q�ł��B�j
GLONASS�̌��p�ɂ���
���V�A��GPS�q���ł���GLONASS����M����J�[�i�r��X�}�z�������ė��܂����B
https://ja.wikipedia.org/wiki/GLONASS�ł̏��ɂ�
�W�����x�M���iSP�R�[�h�j�������p
�����x�M���iHP�R�[�h�j�@���R���p
�Ƃ���܂��B
���ԗ��p�ɂ����Ă͕č�GPS���덷���傫���ƈ�ʓI�Ɍ����Ă��܂��B�y�؊w�������ɂ���RTK�@�ɂ���������x�������ɂ́A���܂�L���ł͂Ȃ��悤�ł��B�������ŋ߂́A������GPS��g�ݍ��킹�錤�����i��ł���A�w�}���`GNSS�x�ƌĂ�Ă���܂��B
�M���R�[�h���g�����P�����x���ł̑��ʂɂ́A�r���E�R�̉A�E�Ȃǂ̎Օ���������ꍇ��GLONASS���܂ޑ����̉q������M���邱�Ƃ���ϗL���Ƃ������Ƃ��ؖ�����Ă��܂��B
APPLE��iPhone��GARMIN��eTrex30��GLONASS����M���邱�Ƃ��o���܂��B
������d�͂͏��������܂������킸�I���ɂ��܂��傤�I
�]�k�ł����AGLONASS�͉q�����Ƃɔ��M���g�����قȂ�܂��B�����FDMA�ƌĂ��Â��Z�p�ł����AGLONASS���ߑ㉻�Ƃ���2011�N�ȍ~�͕č���EU���l�ACDMA�����𗘗p���ė��Ă��܂��B������镪�A�d���w����𑝂₷���Ƃő��ʐ��x�����コ���Ă���悤�ł��B�i�����j
���E�̂f�o�r�iGNSS�j
http://app.qzss.go.jp/GNSSView/gnssview.html�Ő��E��GPS�q���̏����j�^�[�ł��܂��B�O�����́ANORAD�i�k�A�����J�q��F���h�q�i�ߕ��j�����\���Ă���O���������ɎZ�o����Ă��܂��B
��������ׂĎ�M�o����ƃr����R�̒J�Ԃł̐��x���ǂ��Ȃ肻���ł��ˁE�E�E�B�i����ł�10m���x�܂ł̌덷�͐����܂��B�j
2017�N�ȍ~�AL5�M���i���BE5a/����B2a�M���j��L1�M���i�č�L1C/����B1C/���BE1�M���j����g����M�ł���X�}�z���̔�����Ă��܂��B�u���[�h�R���Ёi�{���F�V���K�|�[�����o�L�い�ƃA�����J�̃J���t�H���j�A�B�T���m�[�j���i����L1��L5����M�o����i���Œ����d�͂̃`�b�v�������[�X���Ă��܂��B�@����
�����Ő��Y���ꂽ�A���h���C�h�X�}�z�́AGNSS��M�i������M����M�j���s����悤�ł��BGARMIN��GPSMAP 65/65s/66sr��L1��L5�̓�g����M�ł��܂��B�i���{��QZSS����M�\�ł��B�j
�ŋ߂�iPhone��GNSS��M�o����ƌ��\����Ă��܂��̂ŁA��g��M���Ă���\��������܂����A�d�l�ɂ͖��L����Ă��܂���B
�e���̐M�����͈ȉ��ł��B�g�ň͂����M�����e���݊����̍����M���ł��B

�����Fhttps://interface.cqpub.co.jp/wp-content/uploads/IF1910_125.pdf
�X�}�z���x�P��������
�p�\�R����X�}�[�g�t�H�����g����������RTK�@�ł����@�i�����g�ʑ��j�ɂ�鐸���Ȉʒu����̌�����������s���Ă��܂��BRTKLIB�Ƃ����I�[�v���\�[�X�\�t�g���g���Ă�����̂������̂ł��B�i�����j�i�����Q�j�i����3�j
����́A�\�t�g�E�F�A��M�@�ƌ�����Z�p�ŁA�]���n�[�h�E�F�A�ōs���Ă����M���������\�t�g�E�F�A��ōs�����̂ł��B�n�[�h���J������R�X�g���s�v�Œ�R�X�g�ŐF�X�ȐM���������s�����M�@���J���o���܂��B�i�����j
RTKLIB�́A���Ƃ���Windows�ł�Linux�ł������悤�Ȃ̂ł����AApple�Ђ�IOS�͕s���ł����AGoogle�Ђ�Android�ł�GooglePlay���玎���RTKGPS�A�v�����_�E�����[�h�o���܂��B
���ʂ��邽�߂ɂ́A�@�f�m�r�r��M�@���A�����\�̂f�o�r�A���e�i���K�v�ł��B
��M�@�́AuBlox����NEO-M8P���l�C�̂悤�ł��BGNSS��M�@�����q�`�v�f�[�^�i�܂萶�f�[�^�ŁA�����g�ʑ��Ȃǂ̊ϑ��f�[�^���܂܂�܂��B�j����M���܂��B
���i�̓\�t�g�������AGNSS��M�@��2020�N1�����_��GNSS���W���[�����P���~�ȉ��A�A���e�i���P�`�V���~�ȂǂŁA���N�O�܂�100���~�ȏサ�Ă������l�ł��o���郌�x���ɂȂ��ė��܂����Bhttps://www.u-blox.com/en/product/c94-m8p

���ӓ_�FRTK���ʂłP�`�Q�����̐��x�i�Î~���j�邽�߂ɂ͂P�O�����ȓ��ɂ����������f�[�^����M����K�v������܂��B���O������𗧂ĂȂ����@�Ƃ��ăl�b�g���[�N�^RTK�iNRTK�j���s����悤�ŁA���y�n���@����̃f�[�^�𗘗p�ł���悤�ł��B
�������P�O�����ȏ㗣���Ɛ��x�������܂��B�݂��т��p�̕⋭�f�[�^�iMADOCA-PPP AR�j�𗘗p�������ʂ��s����悤�ł��B
��ǂ���̃f�[�^���l�b�g���[�N�i�C���^�[�l�b�g��d�b����A�����Ȃǁj���瓾����@�͂���������܂����ANtrip�iNetworked Transport of RTCM via Internet Protocol�Ƃ���TCP�x�[�X�̒ʐM�����������������܂��B
RTCM�Ƃ͍��ەW�����c�̖��ł��BRTCM�i�c�̖��j�́u���[�_�[�V�X�e���v�A�u�ً}�ʒu�w�������r�[�R���v�A�u�f�B�t�@�����V����GPS�V�X�e���v�A�u�f�W�^���I���Ăяo���菇�v�Ȃǂ̕W�������s���Ă��܂��BGPS�덷��f�[�^�͂���RTCM����߂��t�H�[�}�b�g�ɏ]���쐬����Ă��܂��B
���ʂ̕�Z�p�͑�\�I�ȕ�����2��ނ���܂��B�iVRS�������u���z��_�v���g�����@�A��FKP�������u��ԋ�ԃ��f���v���g�����@�j�ǂ�����������炢�̐��x�炵���̂ł������I�ȓ��e�Ȃ̂ŏȗ����܂��B
�g�����W�X�^�Z�p�i�Z�p�G���j2018�N1�����\������ɂ��Ƒ�w���Ƃ��������J���Ă����I�[�v������ƌĂ�Ă�����̂������Ă���悤�ł��B�f�m�r�r��M�@��1���~���x�ł������l��c�̂Ȃǂ̗L�u�ɂ�鑐�̍����������݊�ǁi�G���ł�MY����j���S���ɋ}���ɍL����\��������܂��B
�߂������A�I�[�v����ǂ⎄�݊�ǂ��P�O�����ȓ��o����X�}�z�ł�GNSS��M�@�ƍ����x�A���e�i������ΐ��x�̍������ʂ��s�����Ƃ��\�ƂȂ�܂��B

GNSS��M�A���e�i�͏�L�̑傫���ł����c�B�ihttps://www.youtube.com/watch?v=W7twEo5mSv0�j
����I�[�v����ǂƎ��݊�ǂ��L������u�݂��т��v��L6�M���̈Ӌ`������čs�����O�͂���܂��B�i�����j�@�����݊�ǂ͂܂����I�ȑ��ʂƂ��ė��p�ł����ł͂���܂���̂ŁAL6�M����ے肷����̂ł͂���܂���B
�q�s�j���̊��@�i�����g�ʑ��j����M�A���e�i�i��j�����������ő傫���Ƃ������_������܂����A�X�}�z�łT�O�����ȉ��̑��ʂ��ȒP�ɂł��鐢�E���ĊO���������ɗ��Ă���̂�������܂���B�i���ӁF�����������_�ł́AL1��L2�̂Q���g��M���قڕK�{�̂悤�ŁA�܂����m�����K�v�Ȃ̂ŒN�ł��o������̂ł͂���܂���B�j
�b�͊O��܂����A���݂̊�Ǒ����͐������ʂ��L���閾�邢�����Ȃ̂ł����A������̉e�Ƃ��ċ}���ɍL����IoT�f�o�C�X���l�A�E�C���X Mirai���̉����ƂȂ�\�������萸�x��M�����A���萫�Ɍ������Z�L�����e�B�[�ۑ��ł��B

��L�����Y�x���[�p�C�ƌ��������^�T�[�o�[�ł��B�T�[�o�[�����ɖ��h�̑傫���ɂȂ�܂����B���̃��W���[����RTKLIB���g�������݊�ǂ������čs���̂ł��傤���c�B�i���i���F�X�ł����A5000�~�ȉ��̂��̂������悤�ł��B�j
�]�k�ł���Web�����������RTKLIB�Ɋւ��钆����̃y�[�W����������A���ׂ̍��ł͈����ō����x�Ȏ�@��M�S�Ɍ����H���Ă���l�q�ł��B
GNSS���ʃt�H�[�}�b�g
RINEX�iReceiver Independent Exchange Format�j�f�m�r�r��M�@���ϑ��������f�[�^�����̂��߂ɐ��E�I�Ɏg���Ă���t�@�C���`���ł��BGPS�iGNSS�j���[�J�[�͓Ǝ��̎��^�t�H�[�}�b�g�ł����A�N�ł����p�o����悤�Ƀf�[�^�t�H�[�}�b�g��ϊ�����K�v������܂��B
�A���`�W���~���O�Z�p
���鍑����ϔM�S�Ɍ������Ă���W���~���O�i�W�Q�d�g�j�ɑR����Z�p�ł��B
�����_�A�R�����x���ŗ��p���Ă�����@�͂���������܂����A���̈��STAP�ispace-time adaptive processing�j������ԓK�������Ƃ����Z�p������܂��B�i�זE�̘b�ł͂���܂���B�j
�d�g�݂́A������GPS�A���e�i����ׁA����̕�������̓d�g�݂̂�I�����邱�ƂŁA����ȊO�̕������痈��m�C�Y��W���~���O�d�g���u���b�N���܂��B
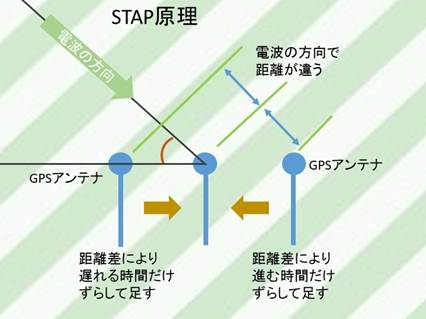
�p�x�ɂ��A���e�i�ւ̓������Ԃ�����邱�Ƃ𗘗p���āA�d�g��x�点�Ċ�������Ɠ���̊p�x����̓d�g�̂ݑI�����邱�Ƃ��o���܂��B�����A����
GNSS-R�iGNSS���˗�����j
�S�n���q�@�q���V�X�e������̍q�@�M���̔��˂��瑪����s���Z�p�ł��B

https://en.wikipedia.org/wiki/GNSS_reflectometry
���̋Z�p�ɂ��s����v���Ƃ��ẮA�@���x�v�Ƃ��Ă̗��p�@�@�A�C�m�w�i�g���ƕ����Ȃǂ̑���j�@�B��X���̊Ď��@�C�y�됅�����j�^�����O�Ȃǂ�����܂��B
GNSS-RO�iGNSS radio occultation�j
�S�n���q�@�q���V�X�e�����n���̑�C�ŋȂ�����ʂɂ���C��Ԃ��ϑ�����Z�p�ł��B
���Ƃ��A�d���w�̌��݁A��C�̉��x�A���́A����ѐ����C�ܗL�ʂɊւ�������o�������ł��B�C�ۊw��V�C�\��p�f�[�^�Ƃ��Ďg�p����A�܂��C��ϓ��̊Ď��ɂ����p�ł��܂��B

GBAS�iGround-Based Augmentation System�j
GBAS=�n��^�q���q�@�⋭�V�X�e���Ƃ͉q������ł͂Ȃ��A�n�ォ��GNSS�̐��x����S�������߂�Z�p�ł��B
https://www.soumu.go.jp/main_content/000548510.pdf
���ԍq��@�̐i���������x�����钅���U���V�X�e���ł��BGNSS�̑��ʂ̐��x����S����ۏႷ�邽�߂̕⋭���i�덷��f�[�^ �A�C���e�O���e�B���A�i���o�H���j��n��Ő����E�������邱�Ƃōq��@�͈��S�Ȑi���������������邱�Ƃ��o���܂��B
�l�H�q���s�v�̃i�r�Q�[�V�����Z�p
�d�g�����Ȃ��C���n���ł̍����x���ʃj�[�Y������܂��B�܂�GPS�V�X�e�����_�E�������ꍇ��A�u���b�N�ł��Ȃ��m�C�Y��W���~���O�̉e�������P�[�X�ւ̑���K�v�ł��B
���̂��߃A�����J���h���������v��ǁiDefense Advanced Research Projects Agency��DARPA�j��e���̌R�E��w�E���Ԃł́A�l�H�q�����g��Ȃ��������x���ʋZ�pPrecision Inertial Navigation Systems �i PINS �j���������Ă��܂��B���̈���A�u��p���q���@�v��p���钴�����\�Ȋ����W���C���iIMU�j�ł��B
��p�ɂ����[�U�[�����g���A��Η�x�t�߂܂ŋɒቷ�ɗ�₷���ƂŔM�G���̉e����}�������q���v�ɂč����\�Ȑ��x�̊����Z���T�[�����A�ʒu�⍂���E���x�𑪈ʂ��悤�Ƃ�����̂ł��B�����@�܂��R�p����s���Ă���2017�N�ɂ̓f�����X�g���[�V�������s��ꂽ�悤�ŁA����������Ɗ��Ɏ�����������Ă���\��������܂��B�����@
���L��DARPA��Microscale Positioning Navigation and Timing�i�}�C�N��PNT�j�Ƃ��������ŁAIMU�`�b�v���g�ݍ��킹�āuTIMU�v�i�^�C�~���O���������胆�j�b�g�j�`�b�v�ɂ��Ă�����̂ł��B

�ʐ^��https://www.darpa.mil/program/micro-technology-for-positioning-navigation-and-timing
�uTIMU�v�ȊO�ɂ��uMRIG�v�A�uPASCAL�v�A�uC-SCAN�v�Ƃ����������i��ł��܂��B
���Ԃŗ��p�ł��鏬�^���������̂͐�ɂȂ肻���ł����A���̋Z�p�����y�����GNSS�̖����͑啝�ɒቺ���܂��B
���{�����ɂȂ��Z�p��Nj�����̂ł���A���̂悤�Ȓ������x�Œ����^�̊����W���C���ɂ��������ׂ����ƌl�I�ɂ͎v���܂��B
--- --- --- --- �@--- --- --- ---�@--- --- --- ---
��L���_�ł����A�����_(2022�N1��)���o�R�����J�[�i�r�A�X�}�z���[�U�[�ɂƂ��Ă��u�݂��т��v���P��M�����Ƃ��������ŁA�����P�ʂ̈ʒu���肪�o���Ȃ����Ƃ��������肢�����������Ǝv���܂��B�i�������o�R�ɂ͂����܂ł̐��x�͕s�v�Ȃ̂ł����A���܂�ɂ�����������̂ł����ď����܂��B�j
����L�PS�M����SBAS�݊��M������M�o�����Ƃ��Ă��P�`�R���ʂ̐��x�ƂȂ�܂��B�������A���̉��b��GPS��M�̗ǍD�������̗ǂ��Ő���A�R���̎O�p�_�t���Ɍ����܂��B
�u�݂��т��v�𗘗p���Ă����P�ʂ̈ʒu���x�邽�߂ɂ����������s���A����L6�M������M����K�v������܂��B�A���e�i���傫���A��M�@�������ŁA�X�тȂǓd�g���r���悤�ȏꏊ�ł̌v���͕s�����ł��B�܂�A�����_�ł̓X�}�z��o�R�p�̃��V�[�o�������������x�̑��ʂ͏o���܂���B
Garmin etrex�̉p��ŁA�A�W�A�łł��u�݂��т��v��ʏ��GPS�Ƃ��Ď�M���Ă���܂��B���{���GARMIN�́A�u�݂��т��v���q���ԍ�255�i���m�q���j�ł͂Ȃ�193�Ƃ��ĕ\������܂��BWeb�ł�255�͑��ʂɗ��p����Ă��Ȃ��Ƃ�����������܂��B
���L�́A�ΐF���č���GPS,���F�����V�A�̃O���i�X�ł��B

��L�͕č�GPS��3�A���V�AGLONASS��2�A���{QZSS��1�ł��A3���ȏ�҂��Ă��m�肵�܂���ł����B
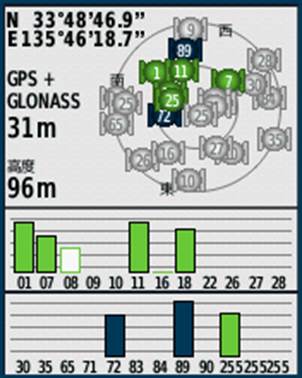
�č�GPS��4��M����ƒ����Ɉʒu���m�肵�܂����B
�ƂȂ�ƁAGLONASS��QZSS�͑��ʂɎg���Ă��Ȃ��H���Ƃ����ƁA������������ł��Ȃ������ł��B�i�ʒu���x�ɍv�����Ă���悤�ł��B�j
�܂��A�����ɕ�����SBAS����M���Ȃ��Ƃ����ȁi�����j�����肻���ł��B�����̗ǂ��ꏊ�ł�MSAS����M���Ȃ��P�[�X�����X����܂��B
���݂�Garmin��X�}�z�́A���{��Ł^�p��łƂ���L1S�i�T�u���[�^�����ʕ⋭�T�[�r�X�j���f�B�t�@�����V��������͎�M�ł��܂���BGARMIN����M�o����\���̂���L1Sb�M���iSBAS�ƌ݊����̂���M���j�́u�݂��т�3���F�Î~�O���v����s���Ă��܂��B�i2020�N�T�[�r�X�J�n�ς݁j
���_�Ƃ����A
�R�����ł��u�݂��т��v����uGLONASS�v��u�K�����I�v����M�o����ق����Ӗ��͂��肻���ł��BGarmin��eTrex��L1��L5�̂Q�g����M�o������̂������o�Ă��ė~�����ł��ˁB�i2022�N1�����_�ł�Garmin GPSMAP 65/65s/66sr�݂̂Q�g�Ή��A���������{�Ŗ������j