
|
|
バイクにもナビが欲しいと、ある日突然HPのiPAQ rx5965というGPS付きのポケットPC(いわゆるPDA)を買ってしまいました。 |
 GPS関連アプリ(ごく最近)か
GPS関連アプリ(ごく最近)か (比較的最近)をつけてあります。
(比較的最近)をつけてあります。関連リンク:
|
|
b-walker(iPAQ付属) ver2.10.19 - 07/05/09WiFiFoFum(フリーウェア) ver2.2.8 - 07/04/19omani(フリーウェア) ver4.0.0.4 - 07/04/28※効果を確認する際、VisualGPSceやb-walkerの衛星画面など、衛星信号のバーグラフが出るアプリを最初にトライすること。正常なら、すぐに衛星番号が表示され、徐徐に信号を補足してゆくのが判るはず。何秒か待って衛星番号すらでなければSiRFとアプリのコミュニケーションが取れていない。(よくあるパターンとしては、NMEAモードに切り替わっていない、Baud Rateを変えてしまった、Message Rateで必要な情報を0にしてしまった、など。)衛星番号さえ出れば、あとは電波と状況次第で数秒〜数分でGPSデータを出力するはず。
このページのトップへ$GPGGA,134221.000,35xx.0088,N,140xx.9810,E,1,05,1.8,20.9,M,39.4,M,,0000*6F $GPGLL,35xx.0088,N,140xx.9810,E,134221.000,A,A*53 $GPGSA,A,3,30,18,14,05,12,,,,,,,,2.1,1.8,1.0*30 $GPGSV,3,1,11,05,74,099,12,12,67,081,17,30,61,184,17,22,56,260,17*7D $GPGSV,3,2,11,18,47,198,25,14,38,316,18,09,34,055,,31,09,260,*77 $GPGSV,3,3,11,06,05,162,,26,03,117,,07,00,172,*4C $GPRMC,134221.000,A,35xx.0088,N,140xx.9810,E,1.08,209.56,260207,,,A*64 $GPVTG,209.56,T,,M,1.08,N,2.0,K,A*0E $GPGGA,134222.000,35xx.0080,N,140xx.9802,E,1,04,2.0,21.0,M,39.4,M,,0000*65 $GPRMC,134222.000,A,35xx.0080,N,140xx.9802,E,1.81,246.13,260207,,,A*67 $GPVTG,246.13,T,,M,1.81,N,3.3,K,A*07 $GPGGA,134223.000,35xx.0082,N,140xx.9770,E,1,06,2.2,24.1,M,39.4,M,,0000*68 $GPRMC,134223.000,A,35xx.0082,N,140xx.9770,E,1.64,271.67,260207,,,A*62 $GPVTG,271.67,T,,M,1.64,N,3.0,K,A*08 $GPGGA,134224.000,35xx.0090,N,140xx.9736,E,1,05,2.2,28.3,M,39.4,M,,0000*63 $GPRMC,134224.000,A,35xx.0090,N,140xx.9736,E,2.04,246.62,260207,,,A*60 $GPVTG,246.62,T,,M,2.04,N,3.8,K,A*04 $GPGGA,134225.000,35xx.0086,N,140xx.9724,E,1,06,2.2,28.0,M,39.4,M,,0000*66 $GPRMC,134225.000,A,35xx.0086,N,140xx.9724,E,0.66,194.51,260207,,,A*6F $GPVTG,194.51,T,,M,0.66,N,1.2,K,A*06 ・ ・ ・ $GPGGA,134311.000,,,,,0,00,,,M,0.0,M,,0000*53 $GPGLL,,,,,134311.000,V,N*7F $GPGSA,A,1,,,,,,,,,,,,,,,*1E $GPGSV,3,1,11,05,74,099,,12,67,081,,30,61,184,,22,56,260,*78 $GPGSV,3,2,11,18,47,198,,14,38,316,12,09,34,055,,31,09,260,*7A $GPGSV,3,3,11,06,05,162,,26,03,117,,07,00,172,*4C $GPRMC,134311.000,V,,,,,,,260207,,,N*49 $GPVTG,,T,,M,,N,,K,N*2C $GPGGA,134312.000,,,,,0,00,,,M,0.0,M,,0000*50 $GPRMC,134312.000,V,,,,,,,260207,,,N*4A $GPVTG,,T,,M,,N,,K,N*2C $GPGGA,134313.000,,,,,0,00,,,M,0.0,M,,0000*51 $GPRMC,134313.000,V,,,,,,,260207,,,N*4B $GPVTG,,T,,M,,N,,K,N*2C $GPGGA,134314.000,,,,,0,00,,,M,0.0,M,,0000*56 $GPRMC,134314.000,V,,,,,,,260207,,,N*4C $GPVTG,,T,,M,,N,,K,N*2C $GPGGA,134315.000,,,,,0,00,,,M,0.0,M,,0000*57 $GPRMC,134315.000,V,,,,,,,260207,,,N*4D $GPVTG,,T,,M,,N,,K,N*2C前半は位置情報捕捉中の5秒ぶん、後半はGPS信号無しの状態の5秒ぶんです。
$GPGGA,132326.000,35xx.9972,N,140xx.9730,E,1,05,5.8,-40.6,M,39.4,M,,0000*48 $GPGSA,A,3,30,18,05,09,12,,,,,,,,7.9,5.8,5.4*35 $GPGSV,3,1,10,05,72,134,15,12,68,108,14,18,56,205,20,22,56,278,20*7A $GPGSV,3,2,10,30,51,185,17,09,40,048,14,14,31,312,11,26,08,111,*7A $GPGSV,3,3,10,31,04,254,,29,00,115,*73 $GPRMC,132326.000,A,35xx.9972,N,140xx.9730,E,2.02,36.46,260207,,,A*55 $GPGGA,132327.000,35xx.9984,N,140xx.9726,E,1,06,1.8,-38.8,M,39.4,M,,0000*41 $GPRMC,132327.000,A,35xx.9984,N,140xx.9726,E,1.41,56.07,260207,,,A*5D $GPGGA,132328.000,35xx.9989,N,140xx.9725,E,1,04,2.6,-37.1,M,39.4,M,,0000*49 $GPGSA,A,3,30,22,05,12,,,,,,,,,2.7,2.6,1.0*37 $GPGSV,3,1,10,05,72,134,15,12,68,108,14,18,56,205,07,22,56,278,15*79 $GPGSV,3,2,10,30,51,185,16,09,40,048,,14,31,312,11,26,08,111,*7E $GPGSV,3,3,10,31,04,254,,29,00,115,*73 $GPRMC,132328.000,A,35xx.9989,N,140xx.9725,E,1.15,96.06,260207,,,A*50 $GPGGA,132329.000,35xx.9988,N,140xx.9721,E,1,04,2.6,-37.7,M,39.4,M,,0000*4B $GPRMC,132329.000,A,35xx.9988,N,140xx.9721,E,0.28,192.94,260207,,,A*65 $GPGGA,132330.000,35xx.9989,N,140xx.9718,E,1,04,2.6,-38.8,M,39.4,M,,0000*48 $GPGLL,35xx.9989,N,140xx.9718,E,132330.000,A,A*5D $GPGSA,A,3,30,22,05,12,,,,,,,,,2.7,2.6,1.0*37 $GPGSV,3,1,10,05,72,134,15,12,68,108,13,18,56,205,12,22,56,278,15*7A $GPGSV,3,2,10,30,51,185,16,09,40,048,,14,31,312,,26,08,111,*7E $GPGSV,3,3,10,31,04,254,,29,00,115,*73 $GPRMC,132330.000,A,35xx.9989,N,140xx.9718,E,0.48,141.71,260207,,,A*65一番重いGSVのレートを2秒にしているので、かえってデータ量が多くなっています。
[Mode Control] - Altitude Hold Mode: Auto - Altitude Hold Source: Last computed + Degraded Mode: Hold clock - Degraded Timeout: 10 + Dead Reckoning Timeout: 5 - Track Smoothing: 無し [Static Navigation] + 無し [DOP Mask] + DOP Selection: Auto PDOP/HDOP + GDOP Value: 5 + PDOP Value: 5 + HDOP Value: 5 [Elevation Mask] - Tracking Mask: 0.0 + Navigation Mask: 5.0 [Power Mask] ※ここはSurfTechとrx5965の間に互換性の問題があるみたい。触らないほうが良い。 [Swich to NMEA Protocpl] NMEAに戻るとき + Update Rate: 上から1, 0, 2, 2, 1, 0, 0... + Use Checksums: チェック + Debug Messages: 白抜きチェック(設定を変更しないという意味) - Baudrate: 9600このページのトップへ
[DGPS Source] + DGPS Source:SBAS [DGPS Mode] + DGPS Selection:Auto [SBAS] (ここはSetできるがGetが正常に働かないので注意) + SBAS PRIN:Auto(あるいはPRN129か137) + SBAS Mode:Testing + Timeout:Default [SiRF -> Set Message Rate] 次の2組を順次Setする + MID: 27 DGPS Status + Update Rate[s]:1 + MID: 29 Nav.Lib. Differential GPS Data + Update Rate[s]:1試してみると、なんとVisualGPSceでちゃんとDGPSモードが表示されました!
$GPGGA,113022.000,35xx.5989,N,140xx.2453,E,1,07,2.3,22.8,M,39.4,M,18.8,0000*7C
赤い数字がDGPSの'Age of Diff. Corr.'というパラメータで、DGPSモードでなければ次のように空白になってたはずです。$GPGGA,113023.000,35xx.5984,N,140xx.2462,E,1,07,2.3,24.9,M,39.4,M,,0000*6A精度は?というと...今日は妙に衛星の調子が良いみたいで、DGPSの効果かどうかがよくわかりません。何日かかけて違いを探ってみたいと思います。
データ変換覚え書き:
- NMEAログ記録
- GPSBabelで 'NMEA 0183 sentences' -> 'Tab delimited fields usuful for...'
(Mac版は日本語名フォルダ使えないので注意!)- グラフソフトで読み込み
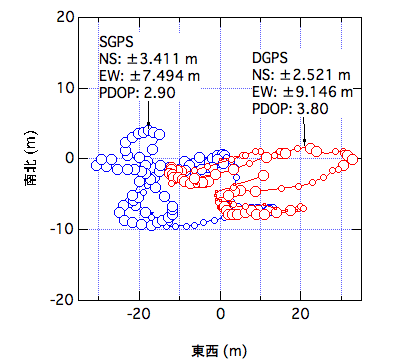 |
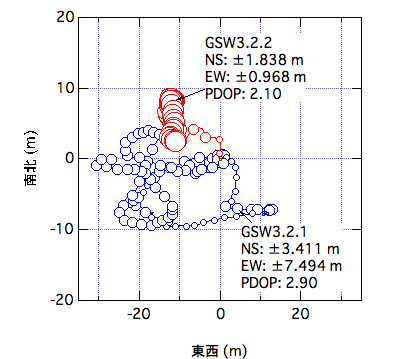
これは、水平位置をプロットしたもので、赤がDGPS状態、青が通常のSGPS状態です。 どちらもかなりふらふらしています。標準偏差を見ても似たり寄ったりですね。やはり電波状況が悪いことのほうがはるかに影響が大きいようです。 ○の大きさは捕捉衛星数を表していて、DGPSで計っていたときのほうが捕捉衛星数がたまたま少なかったようです。これも、差が出ない原因かもしれません。 |
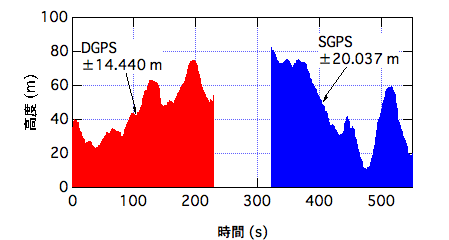 |
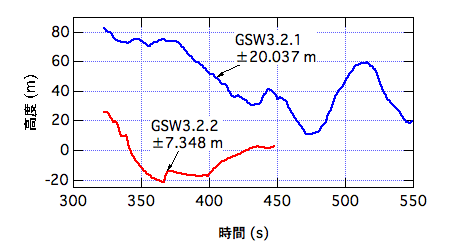
こちらは、同じ測定から、高度の時間変動をプロットしたものです。 高さに関しては、DGPSのほうがふらつきが少ないようです。これは、これまでに試した時も同様の印象でした。 |
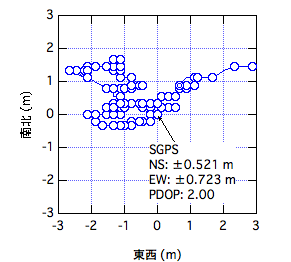
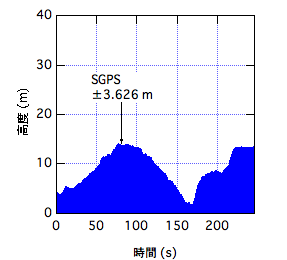
| ちなみに、電波状況の良い開けた場所(衛星6〜7個捕捉)でSGPSで計測すると右の図のようになります。 図のスケールが違うのでご注意下さい。 まだベストではないかもしれませんが、かなり偏差が小さくなっています。DGPSかどうかより、いかに多くの衛星電波をクリアに受信するかのほうがはるかに影響が大きいですね。 |
 |
 |
 |
設定ウィンドウの「移動履歴を保存する」という囲みの右半分に意味ありげな空間があります。そこを6回連続でタップすると、NMEAというチェックボックスが現れます。これにチェックを入れるとNMEAログが保存されます。 保存される場所と名前は、/Storage Card/NMEALOG.TXTです。  これを消去しない限り、2回目、3回目と、このファイルの末尾にどんどん追加されてゆくようです。 不要になったら、NMEAのチェックを外すのを忘れないように! その後、NMEALOG.TXTが書き出されなくなってしまいました。現時点で原因不明! 解決策ご存じの方は、是非お教え下さい。m(_ _)m |
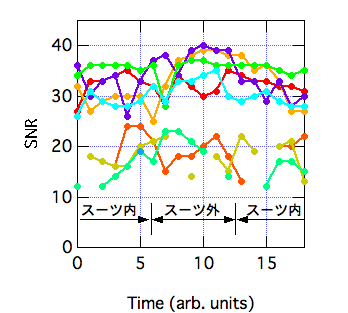 |
これがNMEAログから抜き出したいくつかの衛星のSNR値の時間経過で、最初はスーツ内で、その後スーツから出して、最後にまたスーツに入れて計りました。 スーツから出したほうがSNRがやや高くなっている衛星もありますが、意外に変わらないですね。 これなら問題無く使えそうで安心しました。 |
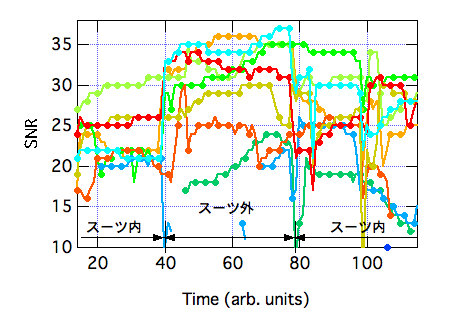 |
その後、どうもスーツに入っていると電波が弱いような気がしたので、もっと補足衛星数の多い別の場所でテストしなおしてみました。 左の図は、前と同じように、スーツ内->スーツ外->スーツ内と連続して測定したSNR値の推移です。いくつかの衛星では、スーツ内でかなり値が小さくなっています。前回なぜあんなに差が小さかったのかは不明ですが、どうやらそれなりに電波は弱まるようです。どの程度結果に影響するかというと、徒歩ナビでの位置の暴れ具合の差がなんとか判る程度です。 エイヤっとGPSアンテナのあたり(横長に置いてボタン類を右にしたときの左上)の革をくりぬいてみました(^^;)が、それでも差はあるようです。 GPSを優先するときにはモバイルスーツから出したほうが良さそうですね.... |
| パラメータ | GSW3.2.1 | GSW3.2.2 | 私的設定値 | [Mode Control] |
|---|---|---|---|
| Altitude Hold Mode | Auto | Auto | Auto |
| Altitude Hold Source | Last computed | Last computed | Last computed |
| Degraded Mode | Disable | Disable | Hold clock |
| Degraded Timeout | 30 | 30 | 10 |
| Dead Reckoning Timeout | 15? | 10 | 5 |
| Track Smoothing | 無し | 無し | 無し | [Static Navigation] |
| 有り | 無し | 無し | [DOP Mask] |
| DOP Selection: | Disabled | Disabled | Disabled |
| GDOP Value | 10 | 10 | 10 |
| PDOP Value | 10 | 10 | 10 |
| HDOP Value | 10 | 10 | 10 | [Elevation Mask] |
| Tracking Mask | 0.0 | 0.0 | 0.0 |
| Navigation Mask | 10.0? | 5.0 | 5.0 | [Power Mask] |
| Tracking Mask | 0 | 0 | 0 |
| Navigation Mask | 12 | 18 | 12 |
 |
 |