
クランク部品の軸を切り離します。残すのは7mm。長めに残しておいて、ヤスリで切断面を整形しながら7mmの長さを出していきます。
画像は左側が加工前、右側が加工後です。
ワイルドからメカ生体へ-15
"wild" to "pre-hystericl monster-machines"-15
ギルラプターの最大の問題点と感じている手足の連動問題を解決します。
ギルラプターは、腕と足が同時に前に出るようになっています。右足を前に出すと右腕が前に出て、左足を前に出すと左腕が前に出てしまいます。メカ生体ゾイドは、右足を前に出したら右腕を後ろに引いて、左足を前に出したら左腕を後ろに引くようになっています。一部のゼンマイゾイドでは、手足が同時に前に出るような機体もありますが、B/Oゾイドでは手足は逆方向に動いていました。手足が同時に出てしまうのは、見ていて不自然で気味が悪いのです。これの解決方法はいくつか考えましたが、一番最初に思いついた、既存のデザインのバランスを崩さない方法を選びました。
まずはクランク部品の寸法を測り、しっかり記録します。更に、本体も仮組みして各所の寸法を測りました。
とりあえず、左側で試作してみます。
|
|
クランク部品の軸を切り離します。残すのは7mm。長めに残しておいて、ヤスリで切断面を整形しながら7mmの長さを出していきます。 画像は左側が加工前、右側が加工後です。 |
図面に従って、クランク軸を逆位置にさせる部品を作ります。
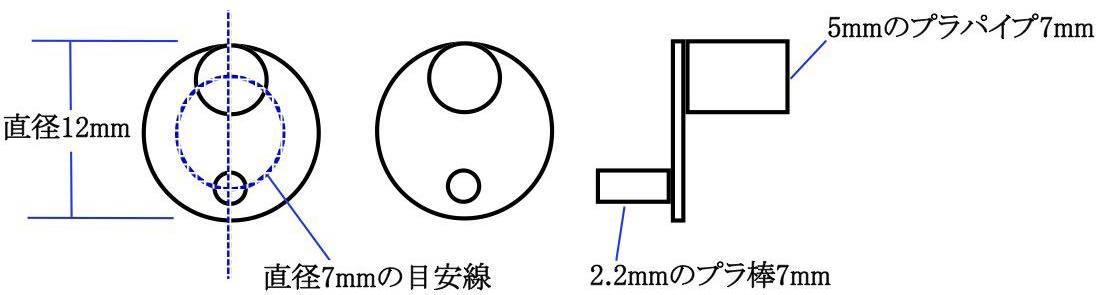
1mm厚のプラ板を直径12mmの円盤に切り出します。12mmの円盤の直径と、12mmの円盤と同じ中心の直径7mmの目安線の交点2カ所に中心位置が来るように、5mmのプラ棒と2.2mmのプラ棒をそれぞれ逆方向に接着します。強度確保のため、真鍮線を通しています。こうしてクランク軸を逆作用させる部品を作ります。長さはそれぞれ7mmとしていますが、長めに作って於いて現物あわせで出来るだけ長く残すのも有りです。特に2.2mmのプラ棒は市販されていませんので、より太いプラ棒やランナーから自作する必要があります。ジョイントの役目を果たさせますので、長ければ長いほど保持力が高まります。
出来た部品を仮組みします。
|
|
2.2mmのプラ棒をクランク部品の切り取った部分に差し込みます。 画像は、左が加工前、右が加工後です。尚組立は、この状態では出来ません。足と腕を組み上げながら途中で組み上げていきます。 |
つまり、クランク軸を逆位置にすることで、腕と足が逆方向に動くようにします。
これらを組み上げながら、必要なその他の加工を行います。
|
|
胴体部品には、腕の部品の内側にオーバル状になっている部分で受ける、ギミック軸が有ります。その差し込まれる軸をまれる軸をおおよそ10mm程延長します。ここはそれほど強度も精度も必要としませんので、既存軸とほぼ同じ太さのプラ棒を接着するだけで充分です。その後、現物あわせで長さを調整します。
足部品。腕のクランク部分とつながる、アクチュエーターを演出するモールドを一部削り落とします。新たに作った、クランク軸を逆位置にさせる部品の円盤部分の通り道を作ります。 |
ここまでの加工済部品を組み上げてみます。
|
|
クランク軸が逆位置になるように、部品を取り付けます。要は、円盤部分が既存のクランク部品と重なるような位置にすると言うことです。 |
|
|
クランク軸を逆位置にする部品が、足部品のモールドに引っかからないことを確認します。 |



