 |
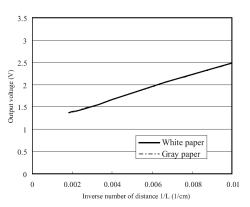
このセンサーは、距離に対する電圧が出力されます。
マニュアルに記載のグラフから、下記の計算式で距離を求めます。
1次関数なので、y = ax + b
aはyの増加量 ÷ xの増加量 で、
(2.5-1.4) / (0.01-0.002) = 1.1 / 0.008 = 137.5
bは、1.4 = 137.5 * 0.002 + b なので、
b = 1.4 - 137.5 * 0.002 = 1.125
y = ax + bを、電圧(V)と長さ(L)に置き換えると、
V = 137.5 * L + 1.125 → L = (V - 1.125) / 137.5
グラフは[1/L]なので逆数にして、L = 137.5 / (V - 1.125)
|
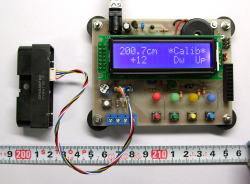 |
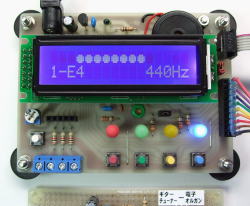
センサーの個体差(誤差)とA/Dコンバータの基準電圧の相違から、キャリブレーションを行うと計測誤差が小さくなります。
SW1[赤] を押しながら[RESET]スイッチを押すと、キャリブレーション・モードに入ります。
センサーから2m(任意)の距離に反射物を置き、測定値を校正して下さい。
SW3[黄]:校正値[−] SW4[青]:校正値[+]
校正値はAVRに記憶され、電源を切っても残ります。
再度[RESET]スイッチを押すと、通常動作に入ります。
|
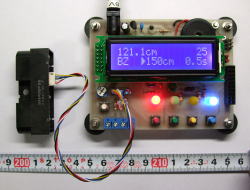 |
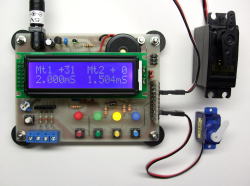
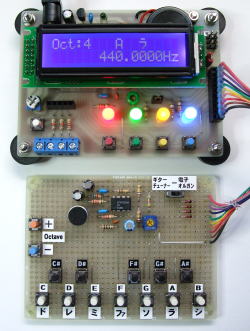
LCDの1行目、左は測定距離、右はアラームの発生回数。
2行目は左から、アラームモード、アラーム設定距離、アラーム検出後の遅延時間。
SW1[赤] アラームモード(ブザー音)の選択。
OFF: ブザー無し。
BZ: アラーム発生中にブザー音。
BZ1: アラーム発生中に1秒間のブザー音。
SW2[緑] 設定項目の選択。 (三角のマークが移動)
左側: 近接アラームの発生距離 (80cm〜500cm)
右側: アラーム検出後の遅延時間 (0.0s〜5.0s)
SW3[黄] 設定値をマイナス。
SW4[青] 設定値をプラス。
|