| miniCANP偱梫媮偺偁偭偨丄娙扨側岝搙昞帵張棟偵偮偄偰丄偦偺嬶懱揑側墘嶼庤抜傪偟傔偡丅 僇儊儔屌桳偺僷儔儊乕僞偲偟偰丄扨埵岥宎偺岝妛宯偱扨埵帪娫偺業岝偵傛傝0摍媺偺峆惎偑1夋慺偵廤岝偟偨応崌偺ADU抣K傪掕媊偡傞丅 幚嵺偵巊梡偡傞朷墦嬀偺岥宎D丄業弌帪娫T偲偡傟偽丄 栚揑惎偺摍媺M偼丄應掕斖埻偺暯嬒抣N偲僗僇僀儗儀儖S偐傜丄 M=-2.512*log{ (N-S)/(K*(D/2)^2*兾*T) } 偲側傞丅 幚嵺偵CCDpro-1600,CCDpro-1a偱媮傔偨K偺抣偼丄 K=10.842[ADU/sec*mm^2*pixel] 偱偁偭偨丅  偙偺抣傪梡偄偰丄偙傟傑偱偵摼傜傟偨僨乕僞傪張棟偟偨偲偙傠丄僲乕儅儖僠僢僾偱偼亇1摍媺掱搙偺岆嵎偱丄E僠僢僾偱偼丄亇0.5摍媺埲壓偵廂傑偭偰偄傞(寁嶼偟偨偲偙傠擇忔岆嵎偼亇0.25摍媺)丅應掕夋憸偼僼傿儖僞側偟偺夋憸偱偁傞偨傔丄壜帇堟偺姶搙偑崅偄E僠僢僾偺岆嵎偑尭偭偰偄傞偲峫偊傜傟傞丅 偙偺抣傪梡偄偰丄偙傟傑偱偵摼傜傟偨僨乕僞傪張棟偟偨偲偙傠丄僲乕儅儖僠僢僾偱偼亇1摍媺掱搙偺岆嵎偱丄E僠僢僾偱偼丄亇0.5摍媺埲壓偵廂傑偭偰偄傞(寁嶼偟偨偲偙傠擇忔岆嵎偼亇0.25摍媺)丅應掕夋憸偼僼傿儖僞側偟偺夋憸偱偁傞偨傔丄壜帇堟偺姶搙偑崅偄E僠僢僾偺岆嵎偑尭偭偰偄傞偲峫偊傜傟傞丅塃恾偼丄E僠僢僾偱偺應掕抣傪僌儔僼壔偟偨傕偺偱丄傑偩丄僷儔儊乕僞偵夵慞偺梋抧偑偁傞傛偆偱偁傞丅 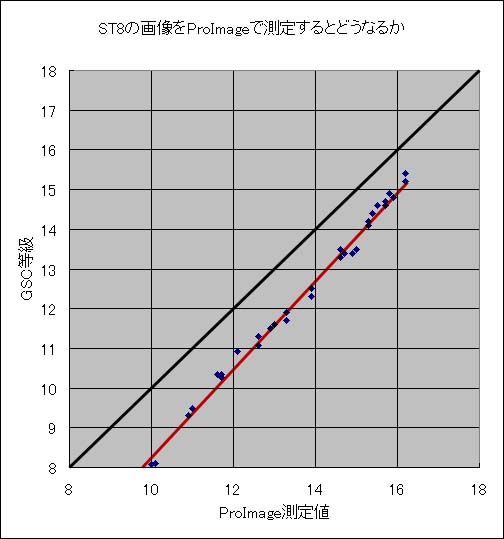 僷儔儊乕僞K偺媮傔曽 僷儔儊乕僞K偺媮傔曽嶣塭偟偨夋憸偐傜丄峆惎偺晹暘偩偗傪僗僥儔僀儊乕僕偱愗傝庢傝怴偟偄夋憸傪嶌傞丅夋憸儊僯儏乕偺夋憸忣曬偱丄僺僋僙儖偺嵟彫抣N偲暯嬒抣S傪挷傋傞丅惎昞側偳偱丄峆惎偺摍媺M傪挷傋傞丅 嶣憸帪偺岝妛宯偺岥宎D丄業弌帪娫T偐傜丄 K=10^[M/2.512+log{(S-N)/((D/2)^2*兾*T)}] 偲偟偰媮傔傞丅偨偩偟丄偁傞掱搙偺悢偵偮偄偰媮傔丄暯嬒抣傪巊梡偡傞偙偲丅 應岝僷儔儊乕僞K偑惓偟偔愝掕偝傟偰偄側偄応崌丄塃恾偺條偵摍媺偵戝偒側岆嵎偑弌傞丅 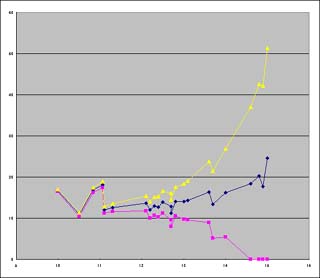 2000.09.12捛婰 2000.09.12捛婰塃恾偼丄KAF-1600傪巊梡偟偨僇儊儔偱240sec業岝傪峴偭偨夋憸偐傜丄摍媺(X幉)丄岝搙應掕僷儔儊乕僞K(Y幉)偺娭學傪昞偟偨傕偺偱偁傞丅墿怓偼丄夋憸擹搙偐傜憐掕偝傟傞嵟戝抣丄巼怓偼嵟彫抣偱偁傞丅 摍媺偑埫偔側傞傎偳僷儔儊乕僞偺暆偼峀偔側傞丅媡偵摍媺偑柧傞偄懁偺怳傟偼丄朞榓偟偨偙偲偵傛傞傕偺偐丄偁傞偄偼傾僷乕僠儍僒僀僘偵傛傞僄儔乕偱偁傞丅 偙偺偙偲傪峫椂偡傞偲丄偙偺夋憸偱應岝僶儔儊乕僞K傪媮傔傞偺偵巊梡偱偒偦偆側摍媺偼丄11.5乣13.5摍惎掱搙偱偁傞丅 偙傟偵傛傝丄 K=12.5[ADU/sec*mm^2*pixel] 傪媮傔傞偙偲偑弌棃傞丅 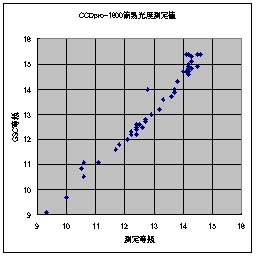
偙偺僶儔儊乕僞偵傛偭偰丄夋憸偺摍媺傪媮傔傞偲塃恾偺傛偆偵側傞丅13.5摍晅嬤偐傜丄慡懱揑偵柧傞偔尒愊傕傞孹岦偑尰傟傞偑丄偙傟偼丄夋憸偺僶僢僋僌儔儞僪偺僶儔僣僉偑14摍掱搙偵憡摉偡傞怳暆傪帩偭偰偄傞偨傔偱偁傞丅 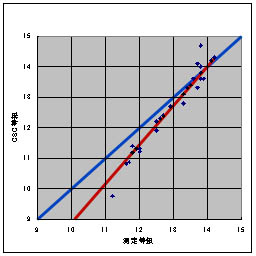 2000.09.18捛婰 2000.09.18捛婰塃偼丄SONY惢CCD ICX085AL偱娙堈應岝傪峴偭偨寢壥偱偁傞丅媮傔偨應岝僷儔儊乕僞偵偼丄傑偩岆嵎偑偁傞傛偆偩丅 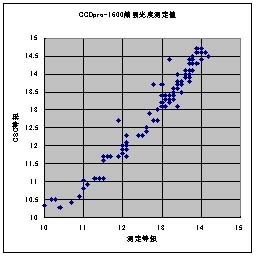 塃偼丄KAF0401LE傪巊梡偟偨僇儊儔偺夋憸傪娙堈應岝偟偨傕偺(僌儔僼柤偼KAF-1600偩偗偳僨乕僞偼KAF401LE偺傕偺偱偡)丅 塃偼丄KAF0401LE傪巊梡偟偨僇儊儔偺夋憸傪娙堈應岝偟偨傕偺(僌儔僼柤偼KAF-1600偩偗偳僨乕僞偼KAF401LE偺傕偺偱偡)丅480昩業岝偲600昩業岝偺夋憸偱僾儘僢僩(傾僷乕僠儍偼16x16夋慺)丅 |