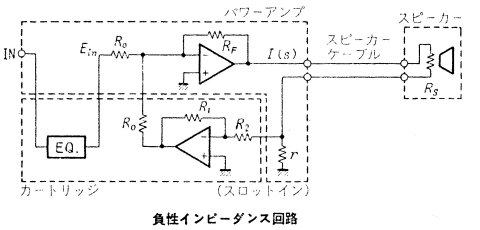
 本文(ヘルムホルツ共鳴のページ)に書いたように、入力0のときスピーカーの振動板を外力で動かそうとすると(力 F を加える)、ヴォイスコイルを含む閉回路にその動きを阻止する方向に起電力が生じ電流(i)が流れる。閉回路の抵抗値が0オームならその電流は無限大となり、振動板の変位は完全に阻止されるが、実際には有限のインピーダンスなので、有限のダンピング・ファクターとなる。しかし、左図に示すようにその阻止電流を
R3で検出し入力に正帰還すると電流値が増幅され大きな制動力を得ることが出来る。(逆にステップ入力で立ち上がる場合は大きな駆動力となる。) つまり、見かけの負荷インピーダンスが小さくなることと等価である。 ただし、実際の入力があった場合、負荷の抵抗成分に対しては電圧正帰還となるので発振する。それを阻止するため
R4、R5 で電圧負帰還をかけておく必要がある。
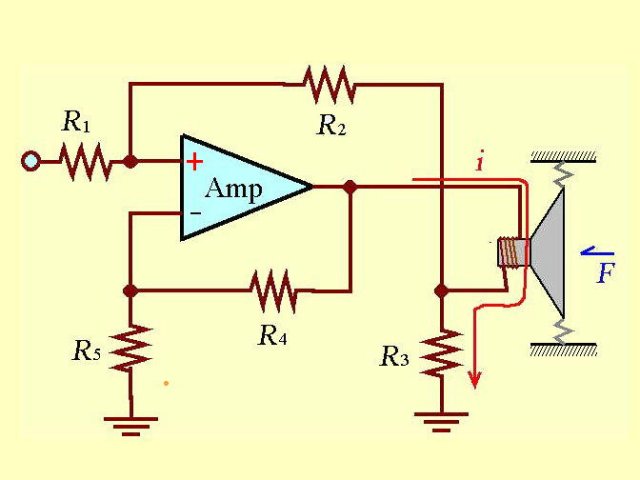
本文(ヘルムホルツ共鳴のページ)に書いたように、入力0のときスピーカーの振動板を外力で動かそうとすると(力 F を加える)、ヴォイスコイルを含む閉回路にその動きを阻止する方向に起電力が生じ電流(i)が流れる。閉回路の抵抗値が0オームならその電流は無限大となり、振動板の変位は完全に阻止されるが、実際には有限のインピーダンスなので、有限のダンピング・ファクターとなる。しかし、左図に示すようにその阻止電流を
R3で検出し入力に正帰還すると電流値が増幅され大きな制動力を得ることが出来る。(逆にステップ入力で立ち上がる場合は大きな駆動力となる。) つまり、見かけの負荷インピーダンスが小さくなることと等価である。 ただし、実際の入力があった場合、負荷の抵抗成分に対しては電圧正帰還となるので発振する。それを阻止するため
R4、R5 で電圧負帰還をかけておく必要がある。といった所であるが、YAMAHAに確認したわけでないので真偽のほどは保証の限りでない。