アームジョーには、
1.待ち受けモード
2.データ転送モード
3.オート動作モード
の3つの動作モードがある。
1.待ち受けモード
電源ONの後、このモードとなり、コンピュータからのコマンドを待つ。
コンピュータからのコマンドとデータ値の対応は次のようである。
| データ値 | D3 | D2 | D1 | D0 | コマンド |
| 0 | 0 | 0 | 0 | 0 | 全停止 |
| 1 | 0 | 0 | 0 | 1 | モータ1正回転開始 |
| 2 | 0 | 0 | 1 | 0 | モータ2正回転開始 |
| 3 | 0 | 0 | 1 | 1 | モータ3正回転開始 |
| 4 | 0 | 1 | 0 | 0 | モータ4正回転開始 |
| 5 | 0 | 1 | 0 | 1 | モータ5正回転開始 |
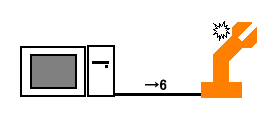
| 6 | 0 | 1 | 1 | 0 | 転送開始 |
| 9 | 1 | 0 | 0 | 1 | モータ1逆回転開始 |
| 10 | 1 | 0 | 1 | 0 | モータ2逆回転開始 |
| 11 | 1 | 0 | 1 | 1 | モータ3逆回転開始 |
| 12 | 1 | 1 | 0 | 0 | モータ4逆回転開始 |
| 13 | 1 | 1 | 0 | 1 | モータ5逆回転開始 |
D2~D0がモータ番号を表し、D3が回転方向を表すようになっている。
ハード編では11通り区別できればよいといったが、転送開始コマンド追加で12通りである。
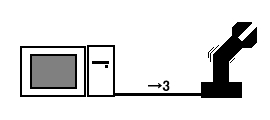
例えばコンピュータからアームジョーにデータ値3が送信されると、アームジョーは、モータ3の正回転を開始するといった具合である。
2.データ転送モード
待ち受けモードで、転送開始コマンド(データ値6)を受信すると、アームジョーはデータ転送モードに変化する。
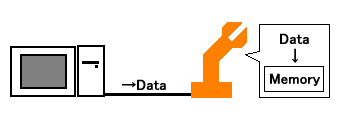
データ転送モードになると、アームジョーは、コンピュータから送信されるデータは、コマンドデータではなくシーケンスデータとみなして、メモリに保存する 動作をする。
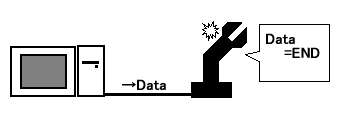
送信終了データを受信すると、待ち受けモードにもどる。
3.オート動作モード
オート動作スタートボタンが押されると、オート動作モードになり、メモリに保存された シーケンスデータを解釈し自動で動作する。終了後、待ち受けモードにもどる。

シーケンスデータの保存フォーマット
オート動作に必要なシーケンスデータは、どのモータを、どちら向きに、どれくらい(動作時間)動かすかの情報が必要である。
これらの情報をまとめて、1バイト(8ビット)の中に次のように格納することにする。
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 向き | モータ指定 または終了コード |
動作時間 | |||||
| 0=正 1=逆 |
001~101=モータ番号 111=終了コード |
0000~1111 (0.5秒単位) |
|||||
なお、データ転送時には、コンピュータからは一度に4ビットしか送信できないので、上位と下位の4ビットずつに分けて転送する。
LED表示
モードが外から見てわかるように、本体LEDの表示をモードによって変えるようにする。
| モード | LED表示 |
| 待ち受けモード | 消灯 |
| データ転送モード | 点灯 |
| オート動作モード | 点滅 |
PICのプログラム
PICのプログラムもモードにより3部構成になっている。おおまかな動作を説明しよう。
まず待ち受けモードでスタートする。
・待ち受けモード
①待ち受けモードでは、データ受信とオート動作スタートボタン入力を監視する。
②データ受信があれば、データ値により上記待ち受けモード時の表に従った動作をする。
データ値6の場合は、データ転送モードに移行する。
③オート動作スタートボタンが押されたら、オート動作モードに移行する。
④最初にもどる。
・データ転送モード
①データ受信を待つ。
②2データ受信したら1つにしてEEPROMに書きこむ。
③データ値を調べ、終了コードであれば、待ち受けモードにもどる。
④最初にもどる。
・オート動作モード
①EEPROMからデータを読む。
②データ値を元にモータを動作させ、またタイマをセットする。
または、データ値が終了コードであれば、待ち受けモードにもどる。
③タイマが0になったら、最初にもどる。
・タイマ処理
タイマ割り込み処理では、データ受信、LED点灯、オート動作モードのタイマ減算を行っている。
細かいことを言うと、実際の動作とは異なる部分はあるが、ざっとこんなところである。
次回PCソフト編へつづく。(えっ!まだ終わりじゃないの? はい。)
