 Gyro monorail by Akubi L.R. (part 1)
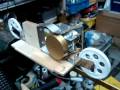
Gyro monorail by Akubi L.R. (part 1) フリージャイロ。バランシングシステムは備えていないが、短時間であれば自立する。これは、ジンバルが歳差したとき、ホイールの半トルクが傾きを修正する方向に効くため。最後は電源を切って、ジャイロの回転を落とし、バランスを崩す様子を捉えている。2009年11月撮影(動画アップは12月)。
|
Gyro monorail by Akubi L.R. (part 1) フリージャイロ。バランシングシステムは備えていないが、短時間であれば自立する。これは、ジンバルが歳差したとき、ホイールの半トルクが傾きを修正する方向に効くため。最後は電源を切って、ジャイロの回転を落とし、バランスを崩す様子を捉えている。2009年11月撮影(動画アップは12月)。 |
 Gyro monorail by Akubi L.R. (part 2)
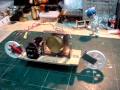
Gyro monorail by Akubi L.R. (part 2) フリージャイロでの実験。上の動画と違うのは、バッテリィを搭載している点だけ。車両の重量に対してジャイロホイール重量が30%以上あり、回転させるだけである程度の安定性は得られる例。上と同様に、最後は電源を切って、ジャイロの回転を落としている。2009年11月撮影(動画アップは12月)。 |
 Gyro monorail by Akubi L.R. (part 3)
Gyro monorail by Akubi L.R. (part 3) フリージャイロでの実験。後部で左右にウェイトを動かし、これによってバランスを取る様子を示している。その他は、3号機と同じ。バッテリィは外部。ウェイトのシフトも、外部のマニュアル・コントロールによる。大きく傾くまえにウェイトを動かす必要があり、コツがいる。2009年11月撮影(動画アップは12月)。 |
 Gyro monorail by Akubi L.R. (part 4)
Gyro monorail by Akubi L.R. (part 4) 初めてジンバルに加力するサーボモータを備えた試作6号機。ツインジャイロに、リモコンで外部からサーボを制御して加力している。この動画では、走行装置を備えていないが、のちに走行できるようにした。ただし、電源はすべて外部。2009年12月撮影。 |
 Gyro monorail by Akubi L.R. (part 5)
Gyro monorail by Akubi L.R. (part 5) 完全な自律系で、ローリングのバランスを自動的に取るシステムを実現した試作8号機。ツインジャイロにサーボモータで加力している。サーボを制御するのは、ジンバルの動きにリンクしたスリップスイッチ。電源も搭載している。2009年12月撮影。 |
 Gyro monorail by Akubi L.R. (part 6)
Gyro monorail by Akubi L.R. (part 6) 同じく試作8号機の試験風景。左右がアンバランスになるようなウェイトを載せたときの挙動を観察しているところ。ジャイロの後ろ左がサーボ、右がバランシングスイッチ(その下にリレー)。この状態で10分以上倒れないことがわかった。2009年12月撮影。 |
 Gyro monorail by Akubi L.R. (part 7)
Gyro monorail by Akubi L.R. (part 7) 走行装置を装備した試作9号機。ツインジャイロは、ギアによるリンケージを採用。2つのサーボモータによるバランシングシステム。完全な自律系。Gゲージの線路を走行するシーン。2009年12月撮影。 |
 Gyro monorail by Akubi L.R. (part 8)
Gyro monorail by Akubi L.R. (part 8) 上と同じ。この当時は、動画を編集することができなかったので、デジカメで撮影したら、そのまま全編をアップするしかなかった。記憶媒体の関係で長い動画も取れない条件だった。2009年12月撮影。 |
 Gyro monorail by Akubi L.R. (part 9)
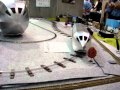
Gyro monorail by Akubi L.R. (part 9) Gゲージの線路を半分に切断し、モノレール用とした。屋外でエンドレス路線を作り、この動画を撮影した。ジャイロモノレールがエンドレスを走る世界初めての動画となり、沢山のメールが世界中から届いた。2009年12月撮影。 |
 Gyro monorail by Akubi L.R. (part 10)
Gyro monorail by Akubi L.R. (part 10) 上と同じ。まだ、走行スピードが速くない状態のとき(その後、電池を増やしてスピードアップ)。左右の揺動も比較的大きい。2009年12月撮影。 |
 Gyro monorail by Akubi L.R. (part 11)
Gyro monorail by Akubi L.R. (part 11) 走行させず、バランシング試験をしているところ。これは調整があまり取れていない状態。左右に揺動するが、倒れることはない。むしろ揺動が大きいときの方が、バランシングで消耗する電力が少ない。2010年1月撮影。 |
 Gyro monorail by Akubi L.R. (part 12)
Gyro monorail by Akubi L.R. (part 12) 上と同じ。バランシングシステムの調整がほぼ取れた状態。このくらいまで調整されていると、走行しているときには揺動は観察できなくなる。調整は、バランシングスイッチ周辺がメイン。2010年1月撮影。 |
 Gyro monorail running in the garden (part 1)
Gyro monorail running in the garden (part 1)走行速度が改善された映像。バランシングの調整も取れている。海外で話題になり、沢山のアクセスがあった映像。2010年1月撮影。 |
 Gyro monorail running in the garden (part 2)
Gyro monorail running in the garden (part 2) 上と同じ。2010年1月撮影。 |
 Gyro monorail model No.9 of Akubi L.R. (part 1)
Gyro monorail model No.9 of Akubi L.R. (part 1)ボディ(上部)が完成したことを記念して走行シーンを撮影。エンドレスにS字カーブも取り入れた。2010年1月撮影。 |
 Gyro monorail model No.9 of Akubi L.R. (part 2)
Gyro monorail model No.9 of Akubi L.R. (part 2) 同じ条件で高速走行のシーン。2010年1月撮影。 |
 Gyro monorail model No.9 of Akubi L.R. (part 3)
Gyro monorail model No.9 of Akubi L.R. (part 3) 上と同じ。2010年1月撮影。 |
 Gyro monorail model No.9 of Akubi L.R. (part 4)
Gyro monorail model No.9 of Akubi L.R. (part 4) エンドレスを逆方向へ走行。2010年1月撮影。 |
 Balancing test of Gyro monorail model No.9
Balancing test of Gyro monorail model No.9 バランシング試験の様子。車内で光っているのは、バランシングスイッチの作動を示すインジケータのLED。2010年1月撮影。 |
 Balancing test of Gyro monorail in one-sided payload
Balancing test of Gyro monorail in one-sided payload 同じくバランシング試験。片側にペンチを載せて、偏心荷重に対する挙動を観察している。力がかかった方向と逆へ傾く。2010年1月撮影。 |
 Running test of Gyro monorail in low and high speed
Running test of Gyro monorail in low and high speed 走行途中でスイッチを操作し、低速から高速へ切り換えている。2010年1月撮影。 |
 Running test of Gyro monorail in high gravity center
Running test of Gyro monorail in high gravity center台車の支柱を調節し、車高を上げ、重心を高くした状態で安定性の試験をしているところ。2010年1月撮影。 |
 G gauge size gyro monorail in balancing test
G gauge size gyro monorail in balancing test9号機よりもあとに完成した試作7号機。バランシングシステムのテストをしているシーン。バランシングスイッチのLEDが点灯。2010年2月撮影。 |
 G gauge size gyro monorail in running test
G gauge size gyro monorail in running test直線の線路を往復して走らせているところ。端にあるストッパにバーが当って、逆転スイッチを切り換える仕組みになっている。2010年2月撮影。 |
 Gyro monorail No.7 running on straight track
Gyro monorail No.7 running on straight trackボディの塗装が終わったところで、走行試験。やや、揺動している。2010年2月撮影。 |
 Gyro monorail No.7 running on curve track
Gyro monorail No.7 running on curve track上と同じ。カーブを通過するときに、揺動が激しくなる。2010年2月撮影。 |
 Gyro monorail (Experimental No.9) completed after painting
Gyro monorail (Experimental No.9) completed after paintingボディの塗装が終わり、完成した試作9号機の走行。2010年4月撮影。 |
 Gyro monorail (Experimental No.9) in A&B special open day
Gyro monorail (Experimental No.9) in A&B special open dayスペシャルオープンディで、披露された試作9号機。2010年4月撮影。 |
 First run of Gyro monorail No.9 in new Bontenzaka garden
First run of Gyro monorail No.9 in new Bontenzaka garden芝生の上に敷かれたレール上を走行する試作9号機。途中でバック運転に切り換えるシーンも。2010年7月撮影。 |
 Gyro monorail built by Mr. Sato running in JAM Convention
Gyro monorail built by Mr. Sato running in JAM ConventionJAM国際鉄道模型コンベンション会場にて、佐藤氏製作のジャイロモノレールのデモンストレーション。赤いボディだけは欠伸軽便製。2010年8月撮影。 |
 Gyro monorail built by Mr. Koike running in JAM Convention
Gyro monorail built by Mr. Koike running in JAM Convention同じくJAM国際鉄道模型コンベンション会場で展示されていた小池氏製作のジャイロモノレール。ビデオデッキのロータをジャイロに利用。プロペラカー風だが、車輪を駆動して走行するもの。2010年8月撮影。 |
 First test of Gyro monorail No.10
First test of Gyro monorail No.10佐藤氏製作のジャイロユニットをタンデムに配置した試作10号機。そのバランシング試験をしている動画。この動画は、ジャイロモノレール関係では最もアクセスが多い(特に日本以外で)。一見フリージャイロに見えるが、下部に軸摩擦を得るスリットがある。2010年10月撮影。 |
 First running test of Gyro monorail No.10
First running test of Gyro monorail No.10試作10号機の静かな走行シーン。速度は遅いが、ほとんどローリングしない安定した走行。ジンバルに加力するバランシング機構が下部に集中しているため、この動画を見て、フリージャイロのモノレールを製作した人が世界中にいるが、もちろんすべて失敗しているはず。2010年10月撮影。 |
 Gyro monorail No.10 with new body
Gyro monorail No.10 with new body完成したボディを被せて走行する試作10号機。2011年8月撮影。 |
 Gyro monorail No.11 in low speed
Gyro monorail No.11 in low speed10号機と同じジャイロユニットを左右に配置した試作11号機。低重心で高速化を目指したデザイン。これは低速走行を撮影したもの。2010年12月撮影。 |
 Gyro monorail No.11 in high speed
Gyro monorail No.11 in high speed試作11号機の高速走行。半径60cmの急カーブを高速で走り抜ける。2010年12月撮影。 |
 Balancing test of Gyro monorail No.11
Balancing test of Gyro monorail No.11試作11号機のバランシング試験の様子。2機のバランシングスイッチを装備し、リレーを省略することができた。軽量化に貢献したのは、佐藤氏製作の省エネのジャイロ。2010年12月撮影。 |
 Gyro monorail No.11 running
Gyro monorail No.11 running同じく、試作11号機の室内走行シーン。上方から撮影した映像で、遠心力がかかったときのジャイロの歳差運動が観察できる。2010年12月撮影。 |
 Gyro monorail No.11 on freezing track
Gyro monorail No.11 on freezing track試作11号機の屋外走行シーン。年末の朝、氷点下7℃で撮影。途中でバック走行も。安定性を示すため、長時間撮影した。このサイズのジャイロモノレールとして、ほぼ満足できる内容と判断した。2010年12月撮影。 |
 Gyro monorail No.11 in JAM Convention Tokyo
Gyro monorail No.11 in JAM Convention TokyoJAM国際鉄道模型コンベンションでの試作11号機のデモンストレーション。2011年8月撮影。 |
 Gyro mono wheel
Gyro mono wheel井上氏製作のジャイロモノホイール(1輪でピッチングを許すものであり、バランシング機構を持たないので、ジャイロモノレールではない)。2011年4月撮影。 |
 Mr. Sato's Gyro monorail in Special Openday 1
Mr. Sato's Gyro monorail in Special Openday 1佐藤氏製作のジャイロモノレール。軸回転摩擦式、シングルジャイロ。簡易な機構だが、高い工作精度に支えられた作品。ボディも佐藤氏のオリジナル。2011年5月撮影。 |
 Mr. Sato's Gyro monorail in Special Openday 2
Mr. Sato's Gyro monorail in Special Openday 2上と同じ。2011年5月撮影。 |
 Lehmann Gyro Car
Lehmann Gyro Carドイツのレーマン社が1913年に製作したジャイロカーのおもちゃ。アメリカに輸出された品をオークションで入手。弾み車で走行する。レール上は走れないのでモノレールではない。2013年2月撮影。 |
 Gyro monorail of German toy
Gyro monorail of German toy ドイツのジャイロ・ロボタという名のおもちゃ。フリージャイロ。2輪だが関節でピッチングを許す構造のためモノホイールと同じ(ジャイロモノレールではない)。2013年11月撮影。 |
 Gyro monorail No.12 in Akubi L.R.
Gyro monorail No.12 in Akubi L.R.5インチゲージサイズの試作12号機の走行シーンを編集なしの映像で。製作したのは、2014年~2015年だが、ボディを2016年に製作した。コンピュータを搭載して、バランシング制御のサーボをコントロールしている。2016年9月撮影。 |
 Gyro monorail No.12 testing retractable gear
Gyro monorail No.12 testing retractable gear上の動画ではなかった引込み脚を新たに装備。そのテストをしているところ。走行と引込み脚はラジコンで操作できる。乗っているフィギュアはバネが仕込まれているので、大袈裟に揺れる(不利な要因として故意に乗せたもの)。2016年9月撮影。 |
 Gyro monorail No.12 running in snow garden
Gyro monorail No.12 running in snow garden 試作12号機の雪景色での走行シーン。木造橋を渡るシーンもあります。2017年1月撮影。 |
 Gyro monorail No.12 testing balancing system
Gyro monorail No.12 testing balancing system試作12号機のバランシング試験の様子。ラズベリィパイ(コンピュータ)、ポテンションメータ、ジンバルと直結したサーボなどの機構がわかる。調整は、プログラムのパラメータを変えることによって行う。2016年9月撮影。 |